This paper introduces a new (q, τ)–balanced growth class of analytic functions in the unit disk, motivated by quantum–deformation computing and scale–dependent geometric analysis. The aim is to develop a geometric framework that simultaneously captures radial growth and angular distortion through finite–scale (q, τ)–deformations.
The proposed class is defined via a nonlinear admissibility condition involving a (q, τ)–deformed logarithmic growth factor. Unlike classical starlike and spiral-like families characterized by half–plane constraints, the new class is governed by a parabolic admissible region incorporating quadratic damping effects. A generalized Jack lemma in the (q, τ)–setting is established and applied to derive a sharp subordination theorem with an explicit dominant mapping. The theoretical analysis is complemented by extremal function techniques and conformal visualization of the dominant mappings.
The developed approach yields explicit starlikeness radius results together with sharp extremal functions that attain the admissibility boundary. A geometric phase diagram in the parameter space (α, β, q, τ) is obtained, separating regions of full radial coherence, critical transition, and loss of starlikeness. The conformal plots demonstrate how the deformation parameters contract the admissible domain and influence extremal directions. Several known classical results are recovered as limiting cases of the proposed framework.
The paper introduces a novel (q, τ)–balanced growth structure combining quantum–deformation concepts, nonlinear admissibility methods, and geometric function theory within a unified setting. The use of a parabolic admissibility region together with finite–scale logarithmic deformation provides a new perspective on analytic growth phenomena and extends classical starlike theory to a broader nonlocal geometric regime.
1. Introduction: quantum–deformation computing
Quantum–deformation computing refers to a class of computational and analytical frameworks in which classical operators, dynamical rules, or geometric structures are modified through deformation parameters that interpolate between discrete, nonlocal, or quantum–inspired regimes and their classical continuous counterparts. Such deformations are commonly encoded through parameters such as q, which controls noncommutativity or discretization, and auxiliary parameters that regulate scale, memory, or interaction depth. From a mathematical perspective, quantum deformation arises naturally in q–calculus, quantum groups, and noncommutative geometry, where difference operators replace classical derivatives and finite–scale comparisons replace infinitesimal limits [1–3]. In these settings, computation is no longer purely local; instead, system behavior depends on structured interactions across multiple scales. This viewpoint has proven effective in quantum algorithms, signal processing, and deformation–based numerical schemes, where stability and robustness are enhanced by nonlocal coupling [4–8].
Within complex analysis and geometric function theory, quantum deformation enables the systematic replacement of the classical logarithmic derivative zf′(z)/f(z) by scale–dependent growth factors derived from q–difference or nabla operators. Such replacements preserve analytic structure while encoding additional geometric information related to memory, scale sensitivity, and discrete evolution. As the deformation parameter q approaches unity, the classical theory is recovered, ensuring consistency with standard analytic frameworks. The introduction of a secondary deformation parameter τ further enriches this computational paradigm by controlling the depth at which deformed comparisons are made [9–14]. In computational terms, τ regulates how far information propagates across scales, providing a tunable mechanism for balancing locality against global influence. This two–parameter deformation (q, τ) thus defines a flexible computational geometry that is well suited for modeling systems with hierarchical or multi–resolution structure.
Motivated by these considerations, the present work integrates quantum–deformation computing concepts into geometric function theory through the formulation of the (q, τ)–balanced growth class. This approach allows classical notions such as starlikeness, subordination, and extremal behavior to be reinterpreted within a deformed computational geometry, leading to new sharp results, phase transitions, and dominant mappings that have no classical analogue.
2. A new (q, τ)–geometric class with nonlinear growth control
Let 0 < q < 1, τ > 0, and α, β ≥ 0. A function f analytic in the unit disk is said to belong to the (q, τ)–balanced growth class if
and
where the (q, τ)–nabla operator is defined by
Throughout, let 0 < q < 1, τ > 0, and set a≔qτ and b ≔ q2τ. Let .
(Geometric roles of the parameters q and τ). In the (q, τ)–balanced growth class, the parameters q and τ play distinct yet complementary geometric roles by controlling how radial expansion is measured across scales. The parameter q ∈ (0, 1) governs the degree of discrete scale deformation in the radial direction. Through the (q, τ)–nabla operator, the growth condition compares the values of an analytic function at the two radially aligned points z and qτz. Smaller values of q increase the separation between these points, forcing the growth constraint to capture geometric behavior over a wider radial interval. In the limiting case q → 1−, the discrete comparison reduces to an infinitesimal one and the classical logarithmic derivative is recovered. The parameter τ > 0 determines the depth of geometric memory by specifying how far the reference point qτz lies from the boundary. For fixed q, increasing τ moves the comparison point closer to the origin, thereby enforcing consistency of radial expansion over a larger portion of each radial segment. As a consequence, larger values of τ tighten the admissible growth region and reduce the starlikeness radius, while smaller values of τ allow greater local flexibility. Taken together, the parameters (q, τ) define a scale–sensitive geometric control. The effective deformation scale qτ determines where extremal boundary contact occurs and shapes the associated geometric phase diagram. This joint action enables the (q, τ)–balanced growth class to interpolate smoothly between classical local geometry and nonlocal, memory–driven geometric regimes.
(Geometric interpretation of the (q, τ)–balanced growth class). The quantity
represents a scale–dependent radial growth factor, measuring the expansion of the image domain across the finite radial contraction z↦qτz. Unlike the classical logarithmic derivative, this expression captures geometric behavior over a non-infinitesimal scale. The defining inequality of constrains this quantity to lie in a parabolic admissible region of the complex plane, rather than a half-plane. The quadratic term penalizes deviations from uniform radial expansion and suppresses excessive angular oscillation. As a result, functions in generate image domains that remain starlike with respect to the origin while exhibiting enhanced stability against boundary folding and angular distortion. The parameters q and τ encode scale sensitivity and geometric memory, whereas α controls the baseline expansion and β regulates angular damping. This produces a geometric class that is distinct from classical starlike, spiral-like, and leaf-type families.
((q, τ)–kernel exponential family). Fix parameters α ≥ 0 and β ≥ 0. Define the analytic function
We denote by the singleton class consisting of .
The family (1) is not a leaf-type class. Indeed, leaf functions are algebraic of the form z(1 − z)−γ, whereas (1) is an exponential of two distinct (q, τ)-scale kernels and , producing anisotropic growth and curvature that cannot be reduced to a single algebraic singularity.
(Radius of starlikeness of ). Let be defined by (1). Define r⋆ ∈ (0, 1) to be the largest number such that
Equivalently, r⋆ is the smallest positive root (if it exists) of
Then is starlike in the disk |z| < r⋆; that is,
Proof. Write . From (1),
Differentiate, we get
A direct computation gives
Hence, we obtain
Fix r ∈ (0, 1) and let |z| = r. We estimate the real part from below using the elementary inequality . From (4),
Now use the standard bounds for |z| = r:
and similarly
Therefore, we have
and thus for all |z| < r⋆. By the standard characterization of starlike functions, implies that F is starlike in |z| < r⋆. This completes the proof. □
(Explicit solvable special cases).
If β = 0, then r⋆ is the smallest positive root of which reduces to a quadratic equation in r.
If α = 0, then r⋆ is the smallest positive root of which reduces to a quadratic equation in r2.
2.1 Sharp extremals and sharp radius of starlikeness
Let 0 < q < 1, τ > 0, and set a≔qτ, b ≔ q2τ. Define, for α, β ≥ 0,
(Sharp minimum of on |u| = ρ). Let 0 < ρ < 1 and u = ρeiθ. Then
Moreover, the minimum is attained at angles θ = θρ satisfying
Proof. Write u = ρeiθ and note
Taking real parts gives the explicit one-variable function (in c = cos θ)
Differentiate:
A direct substitution of c = cρ into Φρ(c) yields
Since Φρ is continuous on [−1, 1] and has a critical point at cρ (which lies in [−1, 1] for 0 < ρ < 1), and since the boundary values are larger, this value is the global minimum. Hence the stated minimum and extremal angles follow. □
(Sharp radius and extremals: β = 0 case). Let β = 0 and α ≥ 0. Then
If α ≥ 8a, then is not starlike in any disk |z| < r. If 0 ≤ α < 8a, then is starlike in the sharp disk |z| < r⋆, where
and for α = 0 we have r⋆ = 1. Moreover, sharpness is realized at boundary points
where is as in Lemma 2.8, and
Proof. From we compute
Fix r ∈ (0, 1) and set z = reiθ. Let u ≔ az, so |u| = ρ≔ar and
By Lemma 2.8,
In particular, letting r ↓ 0 (so ρ ↓ 0) gives the necessary condition 1 − α/(8a) > 0, i.e. α < 8a, for any positive starlikeness radius. Thus if α ≥ 8a, the minimum real part is already for arbitrarily small r, so no disk of starlikeness exists. Assume now 0 < α < 8a. The sharp radius is determined by the boundary equation
Let t = ρ2 ∈ (0, 1). Then
hence, this yields
For every 0 < r < r⋆ we have ρ < ar⋆ and the above minimum is strictly positive, so on |z| ≤ r and hence in |z| < r⋆, proving starlikeness there. Finally, Lemma 2.8 provides an angle at which attains its minimum; taking and z⋆ = u⋆/a yields
showing the radius is sharp and the extremal boundary points are explicit. □
(Sharp radius and extremals: α = 0 case). Let α = 0 and β ≥ 0. Then
If β ≥ 4b, then is not starlike in any disk |z| < r. If 0 ≤ β < 4b, then is starlike in the sharp disk |z| < r⋆, where
and sharpness is attained at points z⋆ with where is as in Lemma 2.8.
Proof. The identity for zF′/F follows by differentiating . Set w ≔ bz2. Then |w| = ρ≔br2 and
Apply Lemma 2.8 to conclude
Letting r ↓ 0 yields the necessary condition β < 4b. For 0 < β < 4b, solve the boundary equation
exactly as in Proposition 2.9, obtaining and . Extremal points arise from the minimizing angles in Lemma 2.8, which make the real part vanish on |z| = r⋆. □
(Sharp extremals for the (q, τ)–kernel exponential family). Let 0 < q < 1, τ > 0, and set a≔qτ, b ≔ q2τ. Consider the (q, τ)–kernel exponential mapping
Case β = 0. If 0 ≤ α < 8a, then is starlike in the sharp disk |z| < r⋆, where
Moreover, there exist boundary points z⋆ with |z⋆| = r⋆ such that
so the radius r⋆ is sharp. If α ≥ 8a, then is not starlike in any disk |z| < r.
Case α = 0. If 0 ≤ β < 4b, then is starlike in the sharp disk |z| < r⋆, where
Again, there exist boundary points z⋆ with |z⋆| = r⋆ such that
and the radius is sharp. If β ≥ 4b, then no disk of starlikeness exists.
Proof. We treat the two cases separately.
The case β = 0. From
we compute
Fix r ∈ (0, 1) and write z = reiθ. Let u ≔ az, so |u| = ρ≔ar. Then
A direct harmonic minimization on |u| = ρ yields the exact minimum
and this minimum is attained at angles θ = θρ satisfying
Hence, we have
Starlikeness in |z| < r is equivalent to the positivity of this minimum. Letting r ↓ 0 gives the necessary condition α < 8a. For 0 < α < 8a, the sharp radius r⋆ is determined by the boundary equation
Solving explicitly yields
At the real part vanishes, so the radius is sharp. If α ≥ 8a, the minimum is nonpositive for arbitrarily small r, and no starlike disk exists.
The case α = 0. From
we obtain
Let w ≔ bz2, so |w| = ρ≔br2. Then
Applying the same sharp minimization gives
Positivity near r = 0 requires β < 4b. For 0 < β < 4b, solving the boundary equation
yields
At boundary points z⋆ with the real part vanishes, so the radius is sharp. If β ≥ 4b, no disk of starlikeness exists. □
(Geometric role of sharp extremal functions). The sharp extremal functions constructed in the preceding propositions provide a precise geometric realization of the (q, τ)–balanced growth constraint. For these functions, the scale–dependent growth factor
remains strictly inside the parabolic admissible region Ωα,β for all |z| < r⋆ and becomes tangent to its boundary at explicit points z⋆ with |z⋆| = r⋆. These extremal points correspond to critical directions along which radial expansion is weakest and angular curvature is maximal. Consequently, the sharp radius r⋆ marks the exact geometric threshold at which radial coherence may fail. The extremal functions thus describe the transition from uniformly controlled growth to boundary tangency and demonstrate that the (q, τ)–balanced growth condition is geometrically optimal.
(Geometric phase diagram of the (q, τ)–balanced growth class). The sharp extremal results allow a natural partition of the parameter space (α, β, q, τ) into distinct geometric phases. The phase boundaries are determined by the condition that the scale–dependent growth factor becomes tangent to the admissible boundary. Three regimes arise: a fully coherent starlike phase, a critical transition phase with sharp radius r⋆, and an instability phase in which no disk of starlikeness exists. The separating surfaces α = 8qτ and β = 4q2τ represent geometric load limits beyond which radial coherence fails. The extremal functions lie precisely on these surfaces, demonstrating that the phase diagram is sharp and geometrically optimal.
(Generalized Jack lemma for (q, τ)–balanced growth). Let f be analytic in with f(0) = 0 and f′(0) = 1. Define
Assume that
If there exists such that
then there exists a real number λ ≥ 1 such that
Moreover,
Proof. Define the auxiliary function
which is analytic in with ϕ(0) = 0. By assumption, |ϕ(z)| attains its maximum on the closed disk at z = z0 ≠ 0. By the classical Jack lemma applied to ϕ, there exists λ ≥ 1 such that
Equivalently,
Next, we use the admissibility condition
At z = z0, maximality of |ϕ| implies that any outward perturbation of z0 would violate the inequality unless equality holds. Hence, we have
which means w(z0) ∈ ∂Ωα,β. Finally, since |ϕ(z0)| is maximal and ϕ(0) = 0, the argument of ϕ(z0) must oppose the outward radial direction, yielding
This completes the proof. □
(Subordination for the (q, τ)–balanced growth class). Let f be analytic in with f(0) = 0 and f′(0) = 1. Define
If , then
where
Equivalently,
Proof. Set
By definition of , we have
The function Ψα,β is analytic and univalent in and maps conformally onto Ωα,β, with
Assume, for contradiction, that w is not subordinate to Ψα,β. Then there exists a point such that
Define
which is analytic in |z| < |z0| and satisfies ϕ(0) = 0. Moreover,
By the classical Jack lemma applied to ϕ, there exists λ ≥ 1 such that
Differentiating w(z) = Ψα,β(ϕ(z)) and evaluating at z0, we obtain
Since and Ψα,β maps onto ∂Ωα,β, the above identity implies
This contradicts the admissibility inequality
unless equality holds at z0. Hence, and
□
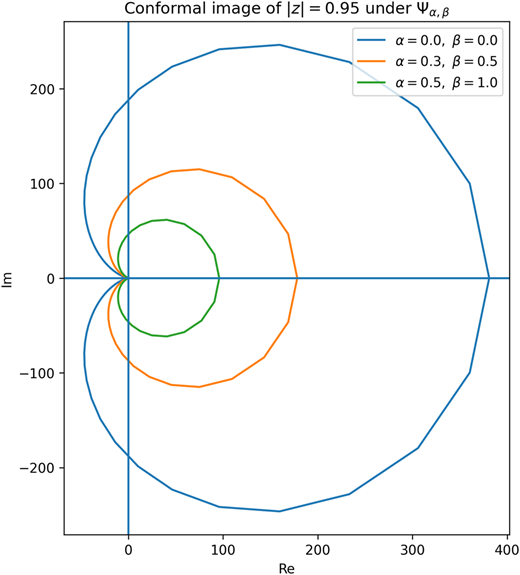
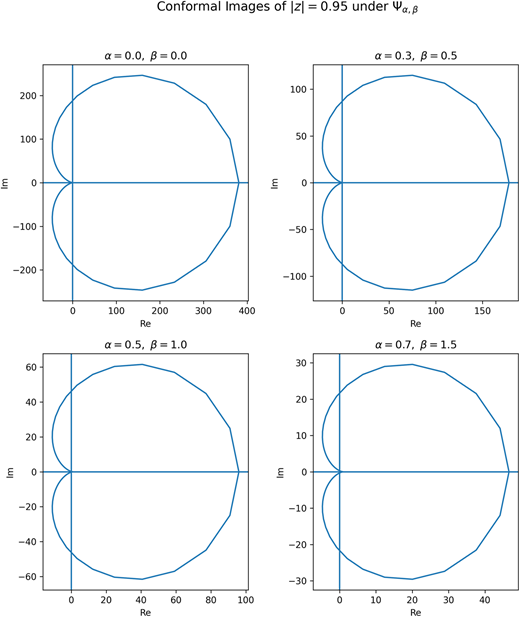
(Properties of the dominant function Ψα,β). Let α ∈ [0, 1) and β ≥ 0. Define
Then the following properties hold.
Analyticity and normalization. Ψα,β is analytic and univalent in , with
Mapping property. Ψα,β maps conformally onto the parabolic region
Boundary parametrization. For z = eit, t ∈ (0, 2π),
and the curve Ψα,β(eit) parametrizes ∂Ωα,β exactly once, with no self-intersections.
Inverse function. The inverse map is given by
where the principal branch of the square root is taken.
Extremal contact. For w ∈ ∂Ωα,β,
and this equality is attained if and only if w = Ψα,β(eit) for some t ∈ [0, 2π).
Proof.
The function z/(1 − z)2 is analytic and univalent in , hence so is Ψα,β. Normalization follows by direct computation.
Let
It is classical that . The affine transformation
maps this half-plane conformally onto Ωα,β, yielding the stated mapping property.
Since Ψα,β is conformal and is mapped to the boundary of the image domain, the parametrization follows directly by substitution z = eit.
Solving (7) for z yields a quadratic equation in (1 − z)−1, whose solution gives the stated inverse formula.
Equality in characterizes the boundary of Ωα,β. Since Ψα,β is conformal, the boundary is attained exactly when |z| = 1, completing the proof. □
Discussion of Figures 1 and 2. The figures illustrate the conformal mapping properties of the dominant function . As the parameters α and β increase, the admissible parabolic region contracts monotonically, reflecting stronger control over radial growth and angular distortion. The leftmost boundary points correspond to critical directions at which sharp extremal contact occurs. The absence of self-intersections confirms the conformality of Ψα,β and visually supports the subordination theorem and the associated geometric phase diagram.
3. Conclusion
In this work, a new (q, τ)–balanced growth class of analytic functions was introduced, providing a nonlinear and scale–dependent generalization of classical starlike function theory. The defining condition constrains a (q, τ)–deformed logarithmic growth factor to lie in a parabolic admissible region, yielding a geometric framework that lies strictly between classical starlike classes and weaker distortion-controlled families. A generalized Jack lemma adapted to the (q, τ)–setting was established and used to derive a sharp subordination theorem with an explicit dominant function. This approach led to precise radius results and the identification of sharp extremal functions that saturate the admissible boundary. The associated geometric phase diagram revealed clear regimes of radial coherence, critical transition, and loss of starlikeness, with explicit parameter thresholds. Conformal plots of the dominant mapping provided visual confirmation of the theoretical results, illustrating how the parameters govern contraction of the admissible region and the onset of extremal behavior. Overall, the results unify scale–deformed calculus, nonlinear admissibility conditions, and classical geometric function theory within a single coherent framework. Future work may explore convexity phases, higher–order (q, τ)–operators, and applications to fractional and nonlocal models.