

The present work focuses on the primality and the Cartesian product of graphs.
Given a graph G, a subset M of V (G) is a module of G if, for a, b ∈ M and x ∈ V (G) \ M, xa ∈ E(G) if and only if xb ∈ E(G). A graph G with at least three vertices is prime if the empty set, the single-vertex sets and V (G) are the only modules of G.
Motivated by works obtained on “the Cartesian product of graphs” and “the primality,” this paper creates a link between the two notions.
In fact, we study the primality of the Cartesian product of two connected graphs minus k vertices, where k ∈ {0, 1, 2}.
1. Introduction
In our paper, G = (V, E) always denotes a finite undirected graph where V = V(G) is a non-empty and finite set, called the vertex-set of G and E = E(G) is a set of pairs of distinct vertices called the edge-set of G. An edge {u, v} of G is denoted by uv. Two distinct vertices u and v of G are adjacent whenever uv ∈ E; otherwise u and v are said to be non-adjacent. Given a finite and non-empty set V, (V, ∅) is the empty graph on V, whereas (V, [V]2) is the complete graph where [V]2 is the set of pairs of V. The complement of each graph G = (V, E) is the graph such that, for x ≠ y ∈ V, if and only if xy ∉ E. Any graph with just one vertex is referred to as trivial.
Let G = (V, E) be a graph and x be a vertex of G. A neighbor of x is vertex y of G such that xy ∈ E. The family of neighbors of x is called the neighborhood of x denoted by NG(v). The vertex x is said to be pendant if it has a unique neighbor.
The degree of x, denoted by dG(x), is to the number of its neighbors. For example, a vertex with degree zero is called an isolated vertex. The minimum vertex degree, known as the minimum degree of G is the smallest vertex degree of G denoted by δ(G).
The notation u— v signifies that uv ∈ E while u.…v means that uv ∉ E. For any two disjoint subsets I and J of V, I— J (resp. I.… J) signifies for each (x, y) ∈ I × J, x— y (resp. x.… y). In particular whenever I = {x}, we denote x— J (resp. x.…J). Furthermore, x ∼ J means x— J or x.…J. The negation is denoted by x ≁ J.
Let G = (V, E) be a graph. A graph G′ = (V′, E′) is a subgraph of G if V′ ⊆ V and E′ ⊆ E. Given a non-empty vertex subset X of V, the subgraph of G induced by X is the subgraph G[X] = (X, E ∩ [X]2). If X is a proper subset of V, G[V \ X] is also denoted by G − X and by G − x whenever X = {x}.
Let G = (V, E) and H = (V′, E′) be two graphs. A bijection f from V onto V′ is an isomorphism from G onto H provided that, for x ≠ y ∈ V, xy ∈ E if and only if f(x)f(y) ∈ E′.
Given a graph G = (V, E), a subset M of V is a module [1] (or a clan [2,3] or an interval [4,5]) of G provided that, for all a, b ∈ M and x ∈ V \ M, xa ∈ E if and only if xb ∈ E. Thus, M is a module of G if for all x ∈ V \ M, x ∼ M. For example, the empty set, V and {x} where x ∈ V are modules of G called trivial modules. A two-element module of G is known as a duo [6]. The graphs that have no duo, are called duo-free graphs. A graph is indecomposable [5] if all its modules are trivial. An indecomposable graph with at least three vertices is a prime graph [7]. All graphs with two vertices at most are indecomposable. However, all the 3-vertex graphs are not prime. Notice that the graphs G and share the same modules. Thus, G is prime if and only if is prime. Given n ≥ 2, the n-vertex graph denoted by Pn is defined on {1, …, n} as follows: for i, j ∈ {1, …, n}, ij is an edge of Pn if |i − j| = 1. Each graph that is isomorphic to Pn is called a path. It is clear that a path with at least 4 vertices is a prime graph. A path with extremities x and y is denoted by (x, y)-path.
Let G = (V, E) be a prime graph. A vertex x of G is critical if G − x is not prime. The graph G is critical if all its vertices are critical. The indecomposability graph of the graph G, denoted by , is the graph defined on the set V(G) as follows: for u ≠ v ∈ V(G), uv is an edge of if G − {u, v} is prime.
Given a graph G = (V, E), a non-empty subset C of V is a connected component of G if for x ∈ C and y ∈ V \ C, xy ∉ E and if, for x ≠ y ∈ C, there is a sequence x = x0, …, xn = y of elements of C such that, for each integer i where 0 ≤ i ≤ n − 1, xixi+1 ∈ E. Clearly, an isolated vertex of G constitutes a connected component of G. The graph G is connected if it has exactly one connected component.
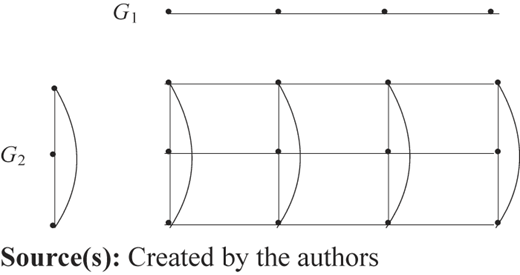
The Cartesian product G□H of graphs G = (V1, E1) and H = (V2, E2) is the graph such that the vertex-set is V(G) × V(H) and (a, x)(b, y) ∈ E(G□H) whenever ab ∈ E1 and x = y or a = b and xy ∈ E2. For any h ∈ V2, the subgraph of G□H induced by V1 ×{h} is called a G-fiber and is denoted by Gh. The H-fiber could be defined similarly. Figure 1 gives an example of the Cartesian product of two graphs.
Consider the following immediate observation.
1.1 Observation
A Cartesian product of two graphs is connected if and only if both factors are connected.
Every proper module of a Cartesian product of two connected graphs is included in a fiber.
The present work focuses on the primality and the Cartesian product of graphs. In the last few years, graph products have emerged again as a flourishing topic in graph theory. It has always been a good method to construct large graphs from small ones. Such products include: the Categorical product [8], the Kronecker product [9], the Cardinal product [10] and the Cartesian product [11–13]. The most widely used one that offers interesting problems may be the Cartesian product, which was first introduced by Sabidussi [14]. These types of graph products and other ones have been the subject of several papers [8,9,15–17]. On the other hand, the concept of primality has also been fundamental in the study of finite structures. Many questions on primality revolve around the study of its hereditary aspect in the graphs. Some papers have appeared along these lines [2,4,18–25]. In the case of graphs a first result dates back to D. P. Sumner [26]: Every prime graph G with at least 4 vertices has a subgraph which is a P4. After that, A. Ehrenfeucht and G. Rozenberg [3] affirmed that the prime graphs have the following ascendant hereditary property: Let X be a subset of a prime graph G such that G[X] is prime. If |V(G) \ X|≥ 2, then there are x ≠ y ∈ V(G) \ X such that G[X ∪ {x, y}] is prime. Later, J. H. Schmerl and W. T. Trotter [5] established the following decending. For each prime graph G with at least 6 vertices, there are a ≠ b ∈ V(G) such that G − {a, b} is prime. To prove this result, the authors have introduced and described the critical graphs.
Motivated by works obtained on ”the Cartesian product of graphs” and ”the primality”, H. Kheddouci proposed to find a link between the two notions. Actually, he asked about the primality of Cartesian product and its subgraphs. This paper provides answers to questions asked by Kheddouci.
First, we establish that the primality of the Cartesian product of two graphs is essentially guaranteed by the connectedness of the two graphs. We obtain the following.
Given two non-trivial connected graphs G1 = (V1, E1) and G2 = (V2, E2) such that |V1|≥ 3 or |V2|≥ 3, then the Cartesian product G1□G2 is prime.
Using Observation 1.1, we deduce the following corollary.
Given two non-trivial graphs G1 = (V1, E1) and G2 = (V2, E2) such that |V1|≥ 3 or |V2|≥ 3, the Cartesian product G1□G2 is connected if and only if it is prime.
Second, we characterize all the vertex pairs of a Cartesian product of two connected graphs such that their suppression results in a prime graph. We obtain the following.
Let G1 = (V1, E1) and G2 = (V2, E2) be two connected graphs such that |V1|≥ 3 and |V2|≥ 3. Consider distinct vertices a = (xa, ya) and b = (xb, yb) of G1□G2.
The pair {a, b} is not an edge of the graph if and only if one of the following conditions is satisfied.
1. There are distinct vertices x0, x1 and x2 of G1 and distinct vertices y0, y1 and y2 of G2 such that , , , and
2. Either xa = xb, xa is the neighbor of a pendant vertex of G1 and {ya, yb} is a duo of G2, or ya = yb, ya is the neighbor of a pendant vertex of G2 and {xa, xb} is a duo of G1.
For example, for G = P3□P3, (see Figure 2)
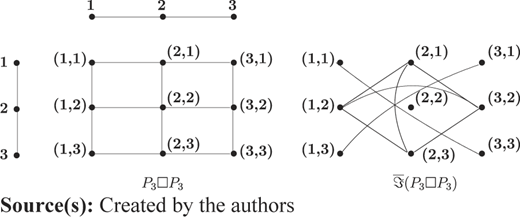
Note that Schmerl and Trotter [5] have confirmed that each prime graph with at least 6 vertices has a non-empty indecomposability graph. Theorem 1.4 describes the edges of the indecomposability graph of the Cartesian product of two connected graphs.
The following corollary is an immediate consequence of Theorem 1.4.
Let G1 = (V1, E1) and G2 = (V2, E2) be two connected graphs such that |V1|≥ 3 and |V2|≥ 3. The graph is complete if and only if one of the following conditions is satisfied.
min (δ(G1), δ(G2)) ≥ 2.
There are i ≠ j ∈ {1, 2} such that δ(Gi) = 1, δ(Gj) ≥ 2 and Gj is duo-free.
Finally, we prove that all the vertices of the Cartesian product of two connected graphs with at least 3 vertices are not critical. We obtain the following.
Given two connected graphs G1 = (V1, E1) and G2 = (V2, E2) such that |V1|≥ 3 and |V2|≥ 3, then G1□G2 has no critical vertex.
The text is organized as follows: Section 2 focuses on the proof of Theorem 1.2 while Section 3 is devoted to the proof of Theorem 1.4. However, Section 4 covers the third main result.
2. Proof of Theorem 1.2
Let two non-trivial connected graphs G1 = (V1, E1) and G2 = (V2, E2) such that |V1|≥ 3 or |V2|≥ 3. Denote G = G1□G2, V = V(G1□G2) and E = E(G1□G2). Let us prove that G1□G2 is prime. On the contrary, suppose that G1□G2 is decomposable and consider I a nontrivial module of it. Since by Observation 1.1 G1□G2 is connected, I cannot be a connected component of it. Thus, there is z ∈ V \ I such that z— I. It follows from Observation 1.1 that . Accordingly the two following cases have to be distinguished.
Case 1. Either or .
Assume that (resp. ). Then, (resp. ). Based on Observation 1.1, since G1 (resp. G2) is connected, then there is h ∈ V1 (resp. h ∈ V2) such that hxz ∈ E1 (resp. hyz ∈ E2). Using the definition of G1□G2 again, there is (resp. ) such that α ≁ I; impossible.
Case 2. and .
In this case, there are two distinct elements u = (xu, yu) and v = (xv, yv) of I such that xu = xz, yv = yz and xu ≠ xv. Using the definition of G1□G2, the vertex t = (xv, yu) verifies tu ∈ E and tv ∈ E because z— {u, v}. In addition, since , necessarily t ∉ I. Hence, t— I. Moreover, for each , th ∉ E and thus h ∉ I. Therefore, I = {u, v}. Consequently, if |V2|≥ 3 (resp. |V1|≥ 3), there is (resp. ) such that αu ∈ E and αv ∉ E (resp. αu ∉ E and αv ∈ E); which is impossible.
3. Proof of Theorem 1.4
We start by the following obvious observations.
3.1 Observation
Let G be a connected graph with at least 3 vertices. Then for any vertices x and y of G, there is a subgraph (not necessarily an induced one) in G containing x and y and isomorphic to Pn where n ≥ 3.
Let G1 and G2 be two connected graphs with at least 3 vertices. Then for any distinct vertices a and b of G1□G2, there is a subgraph (not necessary an induced one) of G1□G2 containing a and b and isomorphic to Pn□Pm where n ≥ 3, m ≥ 3.
Let m and n be two integers such that m, n ≥ 3, Pn□Pm be a Cartesian product and a and b be two distinct vertices of Pn□Pm. Then
(Pn□Pm) − {a} is connected.
(Pn□Pm) − {a, b} is connected if and only if .
Notice that the second assertion of Observation 3.1 is an immediate consequence of the first one.
Let G1 = (V1, E1) and G2 = (V2, E2) be two connected graphs such that |V1|≥ 3 and |V2|≥ 3 and let a and b be two distinct vertices of G1□G2. Then (G1□G2) − {a, b} is not connected if and only if there are x, x′ ∈ V1 and y, y′ ∈ V2 such that , and {a, b} = {(x′, y), (x, y′)}.
Proof. Consider two connected graphs G1 = (V1, E1) and G2 = (V2, E2) such that |V1|≥ 3 and |V2|≥ 3 and two distinct vertices a and b of G1□G2. Let G = G1□G2. Assume that G − {a, b} is not connected. Then there are two distinct vertices c = (xc, yc) and d = (xd, yd) of G − {a, b} such that there is no (c, d)-path in G − {a, b}. Based on Observation 3.1, there is a subgraph of G1 (resp. G2) containing xc and xd (resp. yc and yd) which is isomorphic to Pk where k ≥ 3 (resp. Pl where l ≥ 3). Hence, consider (resp ) where n, m ≥ 3, a longest path of G1 (resp. G2) containing xc and xd (resp. yc and yd) and .
If a∉V(H′) or b ∉ V(H′), then Observation 3.1 confirms that there is (c, d)-path in G − {a, b}; impossible. Presently, assume that both a and b are elements of V(H′). Given Observation 3.1, we have to consider only the case where . Without loss of generality, let {a, b} = {(1, 2), (2, 1)}. To end the proof, it is enough to prove that and . On the contrary suppose that, for example, there is a vertex h = (xh, yh) such that . In case h ∉ V(H′), we obtain the subgraph defined on {1, 2, …, n, xh} which is a path containing (xc and xd) and longer than , which contradicts the choice of . In case h ∈ V(H′), H′ − {a, b} is connected. Thus, there is a (c, d)-path in G − {a, b}; impossible.
Conversely, assume that there are x, x′ ∈ V1 and y, y′ ∈ V2 such that , and {a, b} = {(x′, y), (x, y′)}. It is clear that.
V(G) \{(x′, y), (x, y′), (x, y)} is a connected component of G − {a, b}. Therefore, G − {a, b} is not connected. □
3.2 Proof of theorem. 1.4
Let a = (xa, ya) and b = (xb, yb) be distinct elements of V(G1□G2). Denote G = G1□G2, V(G1□G2) = V and E(G1□G2) = E. Assume that . Hence, G − {a, b} is not prime. If G − {a, b} is not connected, then using Lemma 3.2, there are x, x′ ∈ V1 and y, y′ ∈ V2 such that , and {a, b} = {(x′, y), (x, y′)}. So by considering x0 = x; x1 = x′, y0 = y; y1 = y′ we obtain {a, b} = {(x1, y0), (x0, y1)} and thus the first condition of Theorem 1.4 is verified. Assume that G − {a, b} is connected. Let I be a non-trivial module of G − {a, b}. Obviously, I is not a connected component of G − {a, b}. Then there are u = (xu, yu) ∈ I and z = (xz, yz) ∈ V \ (I ∪ {a, b}) such that uz ∈ E. Based on the definition of G, xu = xz or yu = yz. Without loss of generality, we may assume that xu = xz. Since I is a module of G − {a, b}, z — I. Then . We distinguish the two following cases.
Case 1. Either or .
Without loss of generality, we may assume that . Hence, necessarily . Since G1 is connected, there is h ∈ V1 such that hxu ∈ E1. If |I|≥ 3, . Thus, there is such that α ≁ I; impossible. Consequently, |I| = 2. As I is a duo of G − {a, b}, . Let v = (xu, yv) ∈ I \{u}. It is clear that {yu, yv} is a duo of G2 and {a, b} = {(h, yu), (h, yv)}, thus verifying the second condition of Theorem 1.4.
Case 2. and .
In this case, there is v = (xv, yv) ∈ I such that yv = yz and xv ≠ xu. As G1 and G2 are connected, using the definition of G, there is t = (xt, yt) ∈ V such that xt = xv, yt = yu, tu ∈ E and tv ∈ E.
First, prove that t∉{a, b}. On the contrary, suppose that t ∈ {a, b}. For instance, assume that t = a. Since G1 is connected and |V1|≥ 3, there is xα ∈ V1 \{xu, xv} such that xαxu ∈ E1 or xαxv ∈ E1. The two situations are studied as follows.
In case xαxu ∈ E1. Since , (xα, yu) ∉ I. Moreover, (xα, yu) ≁ I because (xv, yv)….(xα, yu) — (xu, yu). Thus, (xα, yu) = b. Since G2 is connected and |V2|≥ 3, there is yβ ∈ V2 \{yu, yv} such that yβyu ∈ E2 or yβyv ∈ E2. First, assume that yβyv ∈ E2, then (xv, yβ) ∉ I because . Moreover, based on the definition of G, (xu, yu)….(xv, yβ) — (xv, yv); which contradicts the fact that I is a module of G − {a, b}. Second, assume that yβyu ∈ E2 and because otherwise we return to the first step. Observe that (xu, yβ) ∉ I, as z ∉ I, u ∈ I and (xu, yβ)….(xz, yz) — (xu, yu). Furthermore, (xu, yβ) ≁ I because (xv, yv)….(xu, yβ) — (xu, yu); which contradicts the fact that I is a module of G − {a, b}.
In case xαxv ∈ E1, we may also assume that xαxu ∉ E1 because otherwise we return to the first situation. Obviously, (xα, yz)….(xz, yz) as xαxu ∉ E1. Hence, (xα, yz) ∉ I. Moreover, (xα, yz) ≁ I because (xu, yu)….(xα, yz) — (xv, yv). Thus b = (xα, yz). Since G2 is a connected graph with at least 3 vertices, there is yβ ∈ V2 \{yu, yv} such that yβyu ∈ E2 or yβyv ∈ E2. First, assume that yβyv ∈ E2. Then (xv, yβ) ∉ I. Besides, using the definition of G, (xu, yu)….(xv, yβ) — (xv, yv); which contradicts the fact that I is a module of G − {a, b}. Second assume that yβyu ∈ E2 and yβyv ∉ E2 because otherwise we return to the first step. Evidently, (xu, yβ) ∉ I, since z ∉ I, v ∈ I and (xv, yβ)….(xz, yz) — (xu, yu). Furthermore, (xu, yβ) ≁ I, because (xv, yv)….(xu, yβ) — (xu, yu); which contradicts the fact that I is a module of G − {a, b}.
In what remains, assume that t∉{a, b}. Since , we have t ∉ I. Moreover, since u ∈ I and tu ∈ E, t — I. Using the definition of G, for each , th ∉ E and then h ∉ I. Therefore, I = {u, v}.
First, assume that and . Then necessarily and . Since |V1|≥ 3, |V2|≥ 3 and {u, v} is a module of G − {a, b}, we obtain or {b} and or {b}. Thus, by considering, for example, x0 = xu, x1 = xv, x2 = xa, y0 = yv, y1 = yu and y2 = yb, we have {a, b} = {(x2, y0), (x0, y2)}, thus verifying the first condition of Theorem 1.4.
Second, assume that or . Without loss of generality, assume that . Then there is such that h ∈ NG(u) \{t} and h ≁ {u, v}. Therefore, h ∈ {a, b}. For instance, assume that h = a. Since |V2|≥ 3 and G2 is connected, there is w ∈ V2 such that or . To begin with, assume that . Since (xu, w) ≁ {u, v}, (xu, w) = b. Necessarily, and because otherwise there is k ∈ V \{a, b} such that k ≁ {u, v}. Similarly, and . Hence, by considering x0 = xv, x1 = xu, x2 = xa, y0 = yv, y1 = yu and y2 = yb, we obtain {a, b} = {(x2, y1), (x1, y2)}, thus verifying the first condition of Theorem 1.4. Now, we may assume that and because otherwise we return to the first situation. Since (xv, w) ≁ {u, v}, (xv, w) = b. Necessarily, and because otherwise there is k ∈ V \{a, b} such that k ≁ {u, v}. Similarly, and . It results, by considering x0 = xv, x1 = xu, x2 = xa, y0 = yu, y1 = yv and y2 = yb that {a, b} = {(x2, y0), (x0, y2)}, thus verifying the first condition of Theorem 1.4.
Conversely, assume that one of the conditions of Theorem 1.4 is satisfied and let us prove that .
First, assume that the first condition is satisfied. Then there are distinct vertices x0, x1 and x2 of G1 and distinct vertices y0, y1 and y2 of G2 such that , , , and
Therefore, V \{(x0, y1), (x1, y0), (x0, y0)} or {(x0, y1), (x1, y0)} or {(x1, y1), (x0, y0)} is a non-trivial module of G − {a, b}. Thus, .
Second, assume that the second condition is satisfied. If xa = xb, xa is the neighbor of a pendant vertex of G1 and {ya, yb} is a duo of G2 (resp. If ya = yb, ya is the neighbor of a pendant vertex of G2 and {xa, xb} is a duo of G1), in this case, consider x1 (resp. y1) to be a pendant vertex of G1 (resp. G2) such that (resp. ). Clearly, {(x1, ya), (x1, yb)} (resp. {(xa, y1), (xb, y1)}) is a non-trivial module of G − {a, b}. Thus, .□
4. Proof of Theorem 1.6
The proof of Theorem 1.6 is an immediate consequence of Theorem 1.2, the following result due to Y. Boudabbous and P. Ille and also the lemma below.
[21] Let G be a prime graph with at least 5 vertices. For each critical vertex x of G, .
Let G1 = (V1, E1) and G2 = (V2, E2) be two connected graphs such that |V1|≥ 3 and |V2|≥ 3. Then for each vertex a ∈ V(G1□G2), .
Proof. Let a = (xa, ya) ∈ V(G1□G2) and note that G = G1□G2, V(G1□G2) = V and E(G1□G2) = E. The result is obvious when . Then assume that . Thus, there is b = (xb, yb) ∈ V \{a} such that . Then one of the conditions of Theorem 1.4 is satisfied.
First, assume that there are distinct vertices x0, x1 and x2 of G1 and distinct vertices y0, y1 and y2 of G2 such that , , , and
To begin with, assume that {a, b} = {(x0, y1), (x1, y0)}. For instance, we may assume that a = (x0, y1) and b = (x1, y0). Consider the three vertices c = (x0, y0), d = (x0, y2) and e = (x1, y1) of G. Since {ya, y0}, {ya, y2} are not duos of G2 and {xa, x1} is not a duo of G1, then using Theorem 1.4, the vertices c, d and e are neighbors of a in and thus .
Now, assume that {a, b} ∈ {{(x0, y2), (x2, y0)}, {(x1, y2), (x2, y1)}}. If {a, b} = {(x0, y2), (x2, y0)}, for example, we may assume that a = (x0, y2) and b = (x2, y0). Consider the two distinct vertices c = (x1, y2) and d = (x0, y1) of G. Since {ya, y1} is not a duo of G2 and {xa, x1} is not a duo of G1, then based on Theorem 1.4 the vertices c and d are neighbors of a in . Presently, consider the vertex e = (x0, y0) of G. Since , x0 is not a neighbor of a pendant vertex of G1. So using Theorem 1.4, e is neighbor of a in and thus .
At present, assume that {a, b} = {(x1, y2), (x2, y1)}. For instance, consider a = (x1, y2) and b = (x2, y1). Let c = (x0, y2), d = (x2, y2) and e = (x1, y1). Since {ya, y1} is not a duo of G2 and {xa, x0} and {xa, x2} are not duos of G1, then given Theorem 1.4, the vertices c, d and e are neighbors of a in and thus .
Second, either xa = xb, xa is the neighbor of a pendant vertex of G1 and {ya, yb} is a duo of G2, or ya = yb, ya is the neighbor of a pendant vertex of G2 and {xa, xb} is a duo of G1. Without loss of generality, we may assume that xa = xb, xa is the neighbor of a pendant vertex of G1 and {ya, yb} is a duo of G2. Let x0 ∈ V1 such that . As G1 is a connected graph and |V1|≥ 3, there is . Let c = (x0, ya) and d = (x1, ya). Observe that {x0, xa} and {xa, x1} are not duos of G1, then follows from Theorem 1.4. Since G2 is connected, |V2|≥ 3 and {ya, yb} is a duo of G2, there is y0 ∈ V2 such that y0— {ya, yb}.
If yayb ∈ E2, consider e = (x0, y0). If y0 is not a neighbor of a pendant vertex of G2, then based on Theorem 1.4, and thus . In case y0 is a neighbor of a pendant vertex yα of G2, {ya, yα} is not a duo of G2 because yayb ∈ E2 and yα is a pendant vertex. Thus, Theorem 1.4 implies that and then . If yayb ∉ E2, consider e = (xa, y0). It is clear that {ya, y0} is not a duo of G2, therefore, based on Theorem 1.4, and thus . □
