

While the use of long-endurance remotely piloted aircraft systems (LE-RPAS) is frequently associated with military operations, their core capabilities of long-range, low-cost and high-quality optics and communications systems have considerable potential benefit in supporting the work of humanitarian logisticians. The purpose of this paper is, therefore, to demonstrate how LE-RPAS could be used to improve the logistic response to a rapid onset disaster.
Using the response to the Cyclone Pam that struck Vanuatu in March 2015 as an example, this paper provides an overview of how LE-RPAS could be used to support the post-disaster needs assessment and subsequent response processes. In addition, it provides a high-level route map to develop the people, process and technology requirements that would support the operational deployment of the LE-RPAS capabilities.
On the basis of the analysis of the published literature and the resultant assessment of the benefits of LE-RPAS to support humanitarian logistic (HL) operations, it is concluded that a formal “proof of concept” trial should be undertaken, and the results be made available to the humanitarian community.
This paper is conceptual in nature, but has been developed through an analysis of the literature relating to remotely piloted aircraft systems (RPAS) and HLs. A route map through which the paper’s conclusions can be validated is also offered.
LE-RPAS have great potential to provide a swifter understanding of the impact of a disaster, particularly those where the location is remote from the main centres of population. This would allow the affected country’s National Disaster Management Organisation, together with those of supporting countries, to react more efficiently and effectively. In particular, it would allow a swifter transition from a “guess-based” push approach to one that more accurately reflects the disaster’s impact – i.e. a pull-based logistic response.
Given the military genesis of RPAS, it will be important to ensure that those engaged in their operation are sensitive to the implications of this. In particular, it will be essential to ensure that any humanitarian operations involving RPAS are undertaken in an ethical way that respects, for example, the privacy and safety of the affected population.
While there is some emerging discussion on the humanitarian-related use of RPAS in the literature, this generally reflects the operation of small aircraft with limited range and payload capabilities. Useful though such RPAS unquestionably are, this paper expands the discussion of how such systems can support the humanitarian logistician by considering the benefits and challenges of operating long-endurance aircraft.
1. Introduction
In a recent report discussing the use of remotely piloted aircraft systems (RPAS) in a humanitarian context, the United Nations (UN) Office for the Coordination of Humanitarian Affairs (OCHA) (2014) observed that: “[the] move from speculation to reality raises challenging questions around […] how best to integrate [RPAS] into humanitarian response” (p. 3). Discussion of such questions, which are echoed in a separate report from the American Red Cross (2015) entitled “Drones for Disaster Response and Relief Operations”, is timely given that 270 companies in 57 countries are reported as manufacturing RPAS (OCHA, 2014), and that they have already been used in a number of recent disaster responses (UAViators, 2016).
It should, however, be recognised that the concept of “humanitarian response” covers a broad spectrum of activities including those that take place in the immediate aftermath of a rapid onset disaster, the response to slow onset disasters, and the longer term post-disaster recovery phase (Safran, 2003; Van Wassenhove, 2006). Given that the use, benefits and challenges of RPAS operations are potentially different in each of the above contexts, the aim of this conceptual paper is to review the potential for, and operationalisation of, their use in support of the logistic response in the early stage response to rapid onset disasters.
In doing so, it will be noted that the use of the terminology “RPAS” reflects the nomenclature adopted by the International Civil Aviation Authority, and also emphasises the end-to-end nature of such a system. RPAS is, therefore, preferred to alternatives such as “unmanned aerial vehicles” (UAVs) or “drones” as these tend to focus on the flying vehicle rather than the system as a whole. Thus, when referring to the aircraft (as distinct from the overall system), the acronym RPA (or RPAs) will be used.
RPAs range from small rotary wing platforms that cost around US$2,000 (DJI, 2016) to high-end aeroplanes such as the USAF Global Hawk that is the size of a small executive jet and has a unit cost of >US$130 M (United States Government Accountability Office, 2013). However, their generic features include the ability to be flown by an operator who remains on the ground at a distance from the aircraft itself, together with a payload that can include video cameras or still cameras. In some case, this can be supplemented by the ability to transport a removable payload such as equipment or medicines (Amazon, 2016). RPAs can use either fixed or rotary wings, and be powered by fuel or battery-driven engines – as a result their endurance varies from minutes to hours. However, and as will be explained in greater detail in Section 4, this paper will review the potential use of the class of platforms referred to as “long-endurance remotely piloted aircraft systems” (LE-RPAS), “low-altitude long-endurance RPAS” or “Group 2 RPAS”, which typically are able to fly for some four to ten hours. Given the unsettled nature of the nomenclature that is found in the literature, the LE-RPAS variant will be used for both its descriptive benefit and also for its simplicity.
The rationale for the paper’s focus on the post-disaster logistic activities reflects the broadly accepted statistic that the cost of this aspect of response – encompassing procurement, transport into the affected region, warehousing and “last mile” distribution – typically represents some 60-80 per cent of the expenditure of a non-governmental organisation (NGO) (Van Wassenhove, 2006; Tatham and Pettit, 2010). Thus, any actions that can improve the efficiency and/or effectiveness of this element of the sector’s annual spend of some US$25 Bn (Scriven, 2016) are perceived to have clear value.
The focus on rapid onset disasters is similarly aimed at targeting the most challenging humanitarian logistic (HL) context, with such disasters being defined by the International Federation of Red Cross and Red Crescent Societies (IFRC) (2016) as “[…] a sudden, calamitous event that seriously disrupts the functioning of a community or society and causes human, material, and economic or environmental losses that exceed the community’s or society’s ability to cope using its own resources”. Put simply and starkly, HL failures in responding to such events can lead to unnecessary death or prolonged suffering for those who have survived the immediate impact of a disaster (Tatham and Christopher, 2014). Thus, the development of ways in which the logistic response to a rapid onset disaster can be improved represents a clear target for a more detailed investigation.
To achieve the above aim, the next section will outline the challenges facing the humanitarian logistician and, hence, how LE-RPAS might be able to mitigate these. This will be followed (in Section 3) by a review of the existing academic literature as it relates to the use of RPAS in an HL context. Section 4 provides an overview of current LE-RPAs leading to the identification of two exemplar aircraft. Drawing on this, Section 5 outlines the impact of the Cyclone Pam that struck Vanuatu in March 2015 and considers how LE-RPAS might have been used to support the logistic response. Sections 6 and 7 discuss the process and people-related implications of the use of LE-RPAS, and this is followed by a discussion of the cost effectiveness of such operations (Section 8). The paper concludes with a proposed way forward to operationalise the use of LE-RPAS to support the HL response to a disaster.
2. The HL challenge
The challenge facing the humanitarian logistician is increasingly understood as a result of research that has, in particular, emerged since the 2004 Southeast Asia tsunami. A number of recent reviews (e.g. Kunz and Reiner (2012) and Leiras et al. (2014)) provide an overview of the length and breadth of this field but, ultimately, and in the same way as for the management of commercial supply chains, the core requirement is to match supply with demand. However, a number of aspects make the efficient and effective achievement of this balance more difficult in the humanitarian context.
On the demand side, answering the “4 W” question of: “who wants what, where?” – or the so-called “needs assessment” process – is frustrated by issues such as accessing the affected areas and the movements of the population out of (and in some cases into) the region. This aspect of the problem is exacerbated by a frequent lack of detail of the actual demographics of the population (old vs young; male vs female, etc.) and, hence, their specific needs (Tatham and Kovács, 2010). Indeed the needs assessment challenge is elegantly summarised by Arminas (2005, p. 14), who observed that: “purchasing and logistics for major disaster relief is like having the client from hell – you never know beforehand what they want, where they want it, how much they want, and even where they want it sent”.
In particular, the impact of a rapid onset disaster almost always leads to a deterioration of the information-related infrastructure with the resultant exacerbation of the needs assessment challenge. The ability to capture and share information is critical to a successful response as underlined by the IFRC, which devoted much of their 2005 World Disasters Report to the challenges of obtaining and managing information in a timely way (International Federation of Red Cross and Red Crescent Societies, 2005). From a logistic perspective, the key benefit of utilising valid needs assessment information is that it enables the response to migrate from an inefficient “push-based” approach to one that it is more accurately targeted or “pull-based” (Christopher, 2016).
On the other side of the equation, the physical impact of the disaster frequently disrupts resupply routes, thereby degrading the speed and effectiveness of the response. Thus, one of the key challenges here is to understand the current status of such routes and, hence, their ability to support a planned movement of relief goods.
Therefore, given the ability of LE-RPAS to overfly the affected areas and swiftly provide the resultant photographic information to the National Disaster Management Organisation (NDMO), it is suggested that there is a prima facie argument for their use in the aftermath of a rapid onset disaster. With this in mind, the next section will review the literature relating to such operations.
3. Review of the literature
Given that there are potential benefits in using RPAs to mitigate the HL challenge as outlined above, a review of the literature was undertaken based on Kunz and Reiner’s (2012) methodology in which the following databases were searched: ABI/INFORM Complete (ABI), Business Source Complete and Web of Science for academic journals using the keyword and Boolean operator string:
(“unmanned aerial vehicle” OR “UAV” OR “unmanned aerial system” OR “UAS” OR “drone” OR “remotely piloted aircraft system” OR “RPAS”) AND (“disaster response” OR “emergency response” OR “humanitarian logistics”) in the time frame 2005-2016.
It will be noted in this regard that the nomenclature for both RPAS and post-disaster logistic activities is far from settled – hence the need for multiple alternatives within the search string. The starting point for the search timeframe was based on the first reported use of RPAs in a humanitarian context which took place in the aftermath of Hurricane Katrina in 2005 (Tatham, 2009).
The raw number of academic publications returned from this search is shown in Table I.
Each of these papers was examined and, notwithstanding the search string, 38 were found to be not directly relevant as they discussed, for example, the broader challenge of post-disaster information management (Milliken and Linton, 2016), the use of RPAS as part of an occupational hygiene programme (Eninger and Johnson, 2015), or contained dated material that was no longer relevant. This category also included literature reviews of the HL field (such as those of Kunz and Reiner, 2012; Leiras et al., 2014) and more general discussions of the HL challenges offered by Tatham and Pettit (2010) and Tatham and Christopher (2014), both of which mention the potential use of RPAS without offering any specific analysis.
Of the remaining 55 papers, the key themes are summarised based on their core content as follows.
3.1 Discussion
As will be seen from Table II, a major element of the literature is devoted to the actual operation of the RPAS and their associated sensors. These consider ways in which the RPAS capabilities could be improved through, for example, the use of particular mathematical algorithms. Contributions include discussion of route planning (Zheng et al., 2015), collision avoidance techniques (Holt et al., 2014), and dispatching and loitering policies (Bednowitz et al., 2014). However, given the focus of this research into the ways in which LE-RPAS might support HL at a conceptual level, these papers are considered to be out of scope.
Analysis of the database search
| Subject area | ABI | BSC | W of S | Total |
|---|---|---|---|---|
| Technical operation of RPAS sensors and/or communications systems | 5 | 1 | 12 | 18 |
| Use of micro/mini RPAS in disaster response | 10 | 10 | ||
| Ethics/control of RPAS operations | 6 | 6 | ||
| Use of drones for mapping | 5 | 5 | ||
| Development of “dextrous RPAS” that incorporate manipulation devices | 4 | 4 | ||
| Use of RPAS for post-disaster evaluation of buildings and structures | 1 | 3 | 4 | |
| Use of RPAS for environmental analysis | 2 | 1 | 3 | |
| Use of macro RPAS in disaster response | 3 | 3 | ||
| Safety/risk management in RPAS operations | 1 | 1 | ||
| Use of RPAS for detection of fires | 1 | 1 | ||
| Not relevant | 29 | 2 | 7 | 38 |
| Total | 43 | 6 | 44 | 93 |
Unsurprisingly given the growth of micro/miniature RPAS, a significant element of the literature is related to their operation. Examples include their use in a post-earthquake response (Nedjati et al., 2016), their control by means of smartphone technology (Wong et al., 2015) and their potential application in a civil engineering context (Liu et al., 2014). While such research is clearly of importance in understanding how RPAS can be integrated into the HL response to a disaster, it is not fully relevant to the subject of this paper which considers the benefits and challenges of the operation of long-endurance RPAS. These, as will be explained more fully in the next section, are of a significantly larger size than mini/micro platforms which typically can fly for no more than 30 minutes (US Army, 2010).
Another key theme within the literature is discussion of the ethical operation of RPAS and the general implications of the restrictions imposed by, in particular, the United States Federal Aviation Authority (FAA). In this respect, it will be noted that while the FAA (and the equivalent agencies in other countries) are actively engaged in developing regulations that provide a balance between the concerns related to safety and privacy vs the potential benefits of RPA operations both generally and in the aftermath of a disaster, the current legislative environment severely restricts their use. As will be discussed further in Section 6, this is a key area of challenge that will need to be overcome if RPAS are to become part of the normal response mechanism used by the humanitarian logistician.
Furthermore, while the need to ensure the safe operation of RPAS is self-evident, much of the broader ethical discussion reflects the genesis of RPAS as a military weapon (i.e. armed “drones”), and the associated ethical issues surrounding their use. However, at the same time, there is recognition that the core capability of such systems in the provision of real-time images has considerable potential to support the response to a disaster. In this respect, an important contribution from Soesilo and Sandvik (2016) – written on behalf of the Swiss Foundation for Mine Action – offers the results of recent research on the perceptions and applications of RPAS in a humanitarian context.
This research consists of a survey of humanitarian organisations, donors, UN agencies, national governments, private business and other respondents. While the response rate is not provided, the survey is reported to have elicited 194 responses in the period from 15 November 2016 to 15 January 2016. The results of the research can be summarised in the authors’ observation that: “A majority of survey respondents [66%] expressed confidence that drones have the potential to strengthen humanitarian work, and that drones can greatly enhance the speed and quality of localised needs assessments, while a significant minority [22%] viewed the use of drones in humanitarian work unfavourably” (Soesilo and Sandvik, 2016, p. 3). While the authors of this report fully acknowledged the limitations of their work (p. 4), they nevertheless argue that it provides a baseline against which future trends can be determined.
In particular, the survey respondents emphasised (on the positive side) the ability of RPAS to support the needs assessment process; while on the negative side, the core concerns were related to their association with military applications and their potential to increase the “distance” between the beneficiaries and the aid workers. The survey respondents also underlined the need for clear/improved guidance, while the development of a dedicated RPAS service for humanitarian operations received considerable support (61 per cent).
In addition and closely related to the discussion of ethics, a number of papers (e.g. Hayley, 2011) consider the challenges of regulating RPAS from a technical perspective in areas such as collision avoidance and the safety of the population in general. However, this analysis also frequently reflects concerns over the privacy-related impact of RPAS operations. Thus, for example, Smith (2016) highlights concerns raised by a sitting United States Supreme Court judge (Justice Sonia Sotomayor) who, in a recent speech, warned “law students and faculty about “frightening” privacy invasions associated with drone surveillance”. (p. 420, footnote 54).
A number of other important themes emerged from the review such as the use of RPAS for mapping including the work of Piero et al. (2015), Choi et al. (2009) and Lewis (2007), and for the post-disaster structural evaluation of buildings (e.g. Hong et al., 2015). This latter theme is expanded through a parallel set of papers discussing the operation of RPAS that are capable of manipulating objects using arms – and, hence, are potentially able to support rescue operations in locations that are not accessible by ground-based vehicles (e.g. Danko and Oh, 2014). Other relevant areas such as fire detection (Ambrosia et al., 2011) and environmental monitoring (Huang et al., 2011; Bogue, 2011; de Sousa and Goncalves, 2011) are also found in the literature and, as such, all of these papers add detail to the potential and actual operation of RPAS, but in a somewhat broader field than the HL context.
More focussed contributions are found in a number of papers that specifically discuss the potential use of RPAS in support of HL, with three papers of particular relevance being noted, namely those of Tatham (2009), Tuna et al. (2014) and the American Red Cross (2015). In addition, by following the reference trail from within these papers, a further two important contributions were located, namely Czyzewski (2012) and OCHA (2014).
First, the paper by Tatham (2009) was an early contribution to the debate in which the author discusses the suitability of RPAS to support the initial needs assessment in the aftermath of a rapid onset disaster, and in which he argues that such systems do, indeed, have potential to support this process. The core arguments within this paper are perceived to continue to be valid and thus provide the underpinning approach that is expanded in this paper.
Second, Tuna et al. (2014) propose the use of an RPAS as the means of establishing emergency communications in the aftermath of a disaster event. While their evaluation and field tests used an autonomous helicopter (which has a relatively low endurance and limited range), the underpinning principle of using an RPAS in this capacity is perceived to have particular benefit in remote locations.
Third, as mentioned in the introduction to this paper, the American Red Cross (2015) undertook a comprehensive review of the potential of RPAS in a disaster response context. Their report concludes that: “Aerial drones [RPAS] are one of the most promising and powerful new technologies to improve disaster response and relief operations. […] When a disaster occurs, drones may be used to provide relief workers with better situational awareness, locate survivors […] perform structural analysis of damaged infrastructure, deliver needed supplies and equipment, evacuate casualties, and help extinguish fires – among many other potential applications” (p. 4).
The report goes on to analyse previous cases where RPAS have been used and, in particular, suggests (p. 7) the most appropriate tasks to be:
reconnaissance and mapping;
structural assessment;
temporary infrastructure/supply delivery;
wildfire – detection and extinguishing;
high-rise building fire response;
chemical, biological, radiological, nuclear, or explosive events;
search and rescue operations;
insurance claims response and risk assessment; and
logistics support.
The Red Cross report also considers various models for the operation of RPAS ranging from privately owned fleets, via a public-private partnership to the concept of the “Drone as a Service” in which users “only pay for acquisition, processing and delivery of the data they need” (p. 47).
Czyzewski (2012) reports on Project ResQU that completed in 2014 and was designed to investigate the potential for RPAS in disaster response in Queensland, Australia. Specifically, this project highlighted the need for updated regulations governing the use of RPAs in commercial airspace and, as part of this, also investigated the use of technologies to enable RPAs to sense and avoid other aircraft, and to land safely in emergencies.
Finally, OCHA (2014) is one of a series of discussion papers that are designed “[…] to serve as a basis for promoting discussion and policy analysis […]” (cover page). The paper surveys the recent use of RPAS and its analysis concludes that RPAS will have benefit in a number of areas as shown in Table III with a broader commentary offered by the authors of this current research.
RPAS benefits and supporting commentary
| OCHA benefit | Broader commentary |
|---|---|
| Data collection via video/photofeeds | The whole area of achieving a timely and efficient needs assessment process is a recurring theme in the HL literature (e.g. Kovács and Spens, 2007; Kovács and Tatham, 2009) |
| Public information and advocacy through, for example, demonstrating the scale of the damage, the pace of recovery or by highlighting specific problems | While this subject has not been a major feature in the HL literature to date, it is a theme that has significant presence in the broader humanitarian and development literature (e.g. Harvard Humanitarian Initiative, 2011; OCHA, 2016) |
| The search element of “Search and Rescue” missions both at a macro-level and also through the use of small portable (micro) RPAS within buildings, etc. | The use of RPAS to carry out such macro-level missions has been a feature of operational achievements to date (UAViators, 2016), while the use of micro RPAS is under consideration by the International Search and Rescue Community (De Gubber, 2012) |
| Map production | Map production has also been one of the clear benefits of the use of RPAS as evidenced by a number of recent reports (e.g. Medair, 2014; Schroeder and Meier, 2016) |
| Package delivery – noting that, although this is an immature capability, it has the potential to deliver items such as life-saving vaccines | A number of trials of the airborne delivery of medicines and vaccines have been reported recently, including in South Africa (Mendelow, 2015) and Malawi (Kuo, 2016) |
In summary, the published academic literature contains only limited direct consideration of the use of RPAS to support the logistic response to a disaster. However, the more general discussion of the capabilities of such systems clearly underscores their potential benefit in the areas noted by OCHA (2014) and the American Red Cross (2015), and which are summarised above. The next section will, therefore, consider the capabilities of an RPAS in greater depth and, thus, how they might usefully support the HL response to a rapid onset disaster.
4. Choosing an appropriate RPA to support HL operations
As indicated in the introduction to this paper, existing RPAs cover a spectrum of capabilities that typically reflect a balance between weight, endurance and the mode of control. However, as outlined in the earlier discussion (Section 2), the core challenges facing the humanitarian logistician are those relating to needs assessment and the subsequent delivery of relief supplies. Given that both the physical transport and communications infrastructures in a disaster-affected area are highly likely to have been compromised, the key capability of an RPAS is that it should be able to operate efficiently and effectively, notwithstanding the constraints imposed by the impact of the disaster. The implications of this are, therefore, considered in the following subsections.
4.1 Weight and endurance
RPAs are typically classified according to their weight and endurance in a descriptive way as used by, for example, Watts et al. (2012, p. 1673). These authors offer a spectrum of seven groupings from “MAV” (micro (or miniature)) or “NAV” (nano) air vehicles through to “high-altitude long-endurance”, albeit the distinction between the capabilities associated with these groupings is not absolute. Thus, for example, the description of the low-altitude long-endurance (LALE) systems indicates that they “[…] may carry payloads of several kg at altitudes of a few thousand meters for extended periods” (Watts et al., 2012, p. 1674).
An alternative and rather more robust classification has been developed by the United States Department of Defence (USDOD) as shown in Table IV.
UAV Classification according to the US Department of Defense
| Group | Size | Max Gross take-off weight (lbs) | Normal operating altitude (ft) | Airspeed (kts) |
|---|---|---|---|---|
| Group 1 | Small | 0-20 | <1,200 AGL | <100 |
| Group 2 | Medium | 21-55 | <3,500 | <250 |
| Group 3 | Large | <1,320 | <18,000 MSL | <250 |
| Group 4 | Larger | >1,320 | <18,000 MSL | Any airspeed |
| Group 5 | Largest | >1,320 | >18,000 | Any airspeed |
Notes: AGL, above ground level; MSL, mean sea level
Source: US Army (2010)
However, in practice, neither classification is exact noting that a particular RPA may have a weight that places it in Group 2, but an operating altitude that reflects Group 3. Nevertheless, in broad terms, LALE systems reflect the USDOD’s Group 2 Categorisation.
4.2 Mode of control
In parallel with the weight/endurance dimension, a core consideration is the actual control mechanism of the aircraft itself. In practice, most RPAs are designed to be operated on visual line of sight basis – in other words, the controller has to see the RPA and the surrounding airspace in which it is operating at all times. This, in effect, places a 1.5 km limit between the operator and the RPA, although the actual operating area can be extended by following the RPA using another mode of transport (such as a car or boat) while still maintaining the 1.5 km rule. Some companies are, however, now seeking approval to undertake extended visual line of sight whereby the pilot relies on one or more remote observers to keep the unmanned aircraft in sight at all times. These observers then relay critical flight information via radio to the controller and, thereby, assist in maintaining safe separation from other aircraft, etc. (Australian Certified UAV Operators, 2016).
If the requirement is for the RPA to be operated at a greater range from the controller, then this is termed beyond line of sight (BLOS) (sometimes referred to as beyond visual line of sight) and is achieved by hooking up to a satellite the network for command and control. Thus, under a BLOS system, the flight path is not constrained by the need for the controller or another ground control station to “see” the RPA. Clearly in the HL context this is a key benefit as in many cases the epicentre of the disaster is both difficult to access and also at some distance from the main population centres. Thus, for example, in the 2015 Nepal earthquake, the most severely affected regions around Ghorka were more than 100 km from the capital, Kathmandu, across an extremely mountainous terrain. By the same token, the furthest parts of the Tafea Province of Vanuatu struck by the Cyclone Pam (2015) and the Eastern Islands of Fiji that were devastated by the Cyclone Winston (2016) were both some 250 km over water from the country’s capitals.
4.3 Selecting an exemplar RPAS
While there are an increasing number of occasions when RPAS have been used in a disaster response, to date all of the examples provided by UAViators (2016) have involved USDOD Group 1 aircraft. Such systems are (by definition) only capable of short-endurance flights and thus are limited in their ability to support the kinds of missions outlined above where the transit times from the launch site to the disaster site frequently exceed 100 km. With this in mind, it is argued that an RPAS that is suitable for use in support of HL operations, especially those in remote locations, should have a number of baseline capabilities. It should be noted that these capabilities have not been determined directly from the literature in a specific sense, rather that they represent the application of the generic RPAS technology to the particular HL context:
An 8-12 hour (i.e. daylight) flight endurance that will enable the RPAS to operate with a significant time on task (as distinct from in transit). This is a necessity if the requirement is to support the response in a remote location, but it would also provide significant benefits in cases where the response is unfolding in the vicinity of the control station.
In addition, a night flying capability would be beneficial in cases where the daylight times are relatively short as this would allow transits to take place during the hours of darkness and, thereby, maximise the ability to capture data from on the ground during daylight hours. Depending on the actual RPAS configuration, a night flying capability would also enable the use of infrared cameras which could, for example, help locate individuals or groups of people based on their personal thermal signature or that of camp fires, etc.
The above idealised endurance capability requirement implies that the RPAS would be controlled via a BLOS system and this, in turn, requires that the system has a payload that can link with satellite networks as necessary for command and control purposes.
The ability to operate appropriate visual/infrared still and video cameras to support the needs assessment process.
The ability to deliver the resultant data to the NDMO of the affected country swiftly and efficiently.
In addition, given the humanitarian context, the RPAS should be what is referred to as “sub-military”. In other words, it is not within the regime covered by the International Traffic in Arms Regulations or an otherwise restricted model. In effect, this latter requirement restricts the RPAS to USDOD Groups 1 or 2 systems with, as discussed above, the latter having the core endurance and control capabilities appropriate for use when the actual disaster event (and associated response) is taking place in a location that is remote from the controlling station.
Within this Group 2 (LALE) non-military category, two separate sources, namely the American Red Cross (2015, p. 17) and Watts et al. (2012, p. 1674), specifically use the Boeing Insitu ScanEagle as an example of such a system with its capabilities shown in Table V. Unfortunately, as indicated earlier, the research has not been able to uncover any comprehensive listing of non-military RPAS but, based on the knowledge of one of the authors who has considerable experience in this field, a second such non-military Group 2 RPAS – the Aerosonde Mk 4.7 – is perceived to meet the criteria outlined above.
Exemplar LE-RPAS key performance data
| Aerosonde Mk 4.7 | Boeing Insitu Scaneagle | |
|---|---|---|
| Endurance | 14+hours | 24+hours |
| Cruising speed | 90-110 kph (50-60 kts) | 90-110 kph (50-60 kts) |
| Ceiling | 4,570 m (15,000 ft) | 4,500 m (14,750 ft) |
| Wingspan | 3.7 m (12 ft) | 3.11 m (10.2 ft) |
| Overall length | 1.7 m (5.6 ft) | 1.7 m (5.6 ft) |
| Maximum gross take-off weight | 25 kg (55 lb) | 22 kg (48.5 lb) |
| Maximum payload weight | 9 kg (20 lb) | 3.4 kg (7.5 lb) |
| Launch | Catapult or from roof of 4×4 vehicle driving at an appropriate speed | Catapult |
| Recovery | Belly landing or catch net | Catch net |
Sources: Aerosonde: http://civilcommercial.textronsystems.com/ and Scaneagle: https://insitu.com/images/uploads/pdfs/ScanEagle_SubFolder_Digital_PR080315.pdf
As will be seen from Table V, the capabilities of these two RPAS are similar – albeit the Aerosonde has a shorter endurance reflecting its greater payload. Also, it is important to stress that these represent exemplars of the Group 2 LE-RPAS and thus they will be used to provide a generic perspective on how their capabilities might be used to support the humanitarian logistician.
In summary, the above performance data indicate that such an LE-RPAS will, at minimum, be capable of flying BLOS for at least ten hours with a payload of no less than 3.4 kg (7.5 lb). Furthermore, the payloads themselves are broadly similar and can support the use of visual or infrared video cameras or still cameras together with the necessary communications systems to support BLOS flight.
The next section of the paper will offer an overview of how such an LE-RPAS might be operationalised using a recent major disaster in the Pacific region (the Cyclone Pam) as an example. This disaster has been chosen as it is broadly representative of multiple similar events in the region (such as Typhoon Haiyan, 2013; Cyclone Winston, 2016). Indeed, such wind-related events are a regular feature of the Southern Pacific region and it is also suggested that, as a result of climate change, the magnitude of the most severe events may increase (Knutson et al., 2010).
5. Cyclone Pam – a case study
5.1 Reprise of cyclone pam
Vanuatu, a nation of some 20 major and multiple smaller islands, was struck by the Category 5 Cyclone Pam on the morning of 16 March 2015 with the southern group of islands (Tafea Province) receiving a “direct hit” from one of the most intense cyclones on record. While the death toll was remarkably low, around 75,000 people (some 40 per cent of the country’s population) needed emergency shelter and, in addition, more than 95 per cent of the crops were destroyed (Australian Broadcasting Corporation, 2016).
An additional complicating factor was that the cyclone damaged or destroyed much of the communications systems so that, even 48 hours after the event, it was not possible to communicate with the five islands in the province (United Nations Logistics Cluster, 2015a). Furthermore, as will be noted from Figure 1, the islands of Tafea Province are located 150-250 km from the capital Port Vila, which also houses the country’s international airport.
In addition to the standard logistical-informational challenges of understanding the scope of a disaster that had overwhelmed the traditional coping mechanisms, the destruction of the communications systems seriously hampered the ability of communities to coordinate with relevant authorities. By the same token, the damage to the road systems (through fallen trees, landslides and general degradation of the roads themselves), together with the rough sea conditions and associated damage to boats, limited the extent to which individuals and regional authorities could self-report (United Nations Logistics Cluster, 2015b). Even five to ten days after the onset of the disaster, the absence of coordinated and real-time input to the NDMO and gaps in the reporting processes hampered the ability for the authorities to make informed and decisive decisions during this critical initial stage of the response, with a corresponding impact on those already affected by the disaster (United Nations Logistics Cluster, 2015b).
In summary, it is argued that the lengthy over-water transit distances from the capital to the affected islands, in combination with the impacted communications capability, support the use of LE-RPAS as a means of improving the needs assessment process. The next section will describe how this might have taken place.
5.2 How might the response to Cyclone Pam have been different if the proposed system been operational?
As indicated in Table V, one of the core capabilities of an LE-RPA is its capability to undertake both high- (up to 4,500 m) and low-level aerial surveillance over a long time period of some eight hours using a video camera, or some ten hours using still photography. In this regard, while video footage has the benefit of real-time data capture it cannot be transmitted over a distance in excess of some 100 km between the RPA and the ground station. However, the capabilities of the latest generation still cameras are such that, after post-mission processing, they provide the equivalent of a video camera output, with the time required for such processing being similar to the time needed for the data capture.
Either approach would have potentially provided the NDMO with an overview of the impact of the disaster in order that response resources could have been appropriately targeted. Importantly, the data collected by this process could be transmitted in parallel both to the NDMO as well as the equivalent crisis coordination centres (CCCs) in supporting countries (such as Australia and New Zealand in this case). This is a key benefit as it enables the supporting governments and agencies to respond in a way that better targets identified needs – in effect allowing them to transition more swiftly from a “guesstimated” push-based response to one that is more closely requirements-led (i.e. pull-based).
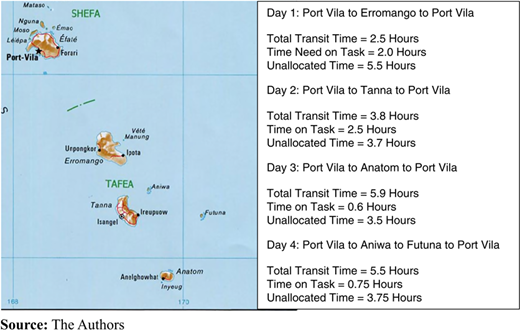
Clearly, the effectiveness of the LE-RPAS-driven data capture and subsequent analysis leading, in turn, to improved decision making is, at present, an assumption that needs to be demonstrated – and this is the aim of the proposed “proof of concept” trial recommended in Section 9. Nevertheless, assuming that the capability of the LE-RPAS will, indeed, achieve this aim, the use of an aircraft with a still camera at a cruising speed of 100 kph and a range of 1,000 km (ten hours flight time) would have resulted in a comprehensive overview of the impact of the disaster on the five islands in Tafea Province over a four-day period as shown in Figure 1.
In developing the associated timings, the population locations on each island have been taken into account, and conservative estimates of distances and timings have been used. Notwithstanding the use of such conservative assumptions, it will be noted that between 5.5 hours (best case) and 3.5 hours (worst case) unallocated flying time is available as a contingency. Technically, therefore, it would probably have been possible to carry out the survey flights in just three days rather than four, but again, a conservative approach has been adopted.
Thus, one might anticipate a typical mission (such as that summarised for Day 1 in Figure 1), would take ten hours, of which up to 7.5 hours would comprise still picture data capture. On returning to Port Vila, this would take some 7.5 hours to process, thereby enabling the data to be ready for the next morning’s briefing and decision-making session in the NDMO.
While the use of an RPAS to capture the post-disaster realities in the affected area is unquestionably valuable, the benefits would be significantly improved were these results able to be compared with a pre-disaster baseline. To an extent this could be achieved in the typical 48 hour warning period between the clear indications that a cyclone is likely to strike a country or region and its actual onset. However, the development of a pre-planned surveillance programme that is focussed on areas of high risk has the potential to provide significantly more meaningful data.
In addition to such surveillance missions, the RPAS is also able to provide an ad hoc mapping service in the event that suitable information is not readily available – as was the case in the aftermath of Typhoon Haiyan that struck the Philippines in 2013 (American Red Cross, 2015, p. 16).
Turning to the technical operation of the RPAS, the fact that it is likely to have to operate in high winds should present no insuperable problems. Indeed, its capability in this regard has a further potential benefit as the RPA could be fitted with suitable equipment to monitor the core of the cyclone. This has already been undertaken when, in 2007, an Aerosonde RPA flew for 7.5 hours monitoring the core of the 130 kph (80 mph) Hurricane Noel thereby providing data to the US National Aeronautics and Space Administration and the US National Oceanic and Atmospheric Administration (NASA, 2007).
The second core capability that would have been invaluable in the response to Cyclone Pam is that of carrying and dropping a small payload such as a satellite phone and associated solar powered battery systems. This would have enabled the provision of a communications system with a direct link to the NDMO (and CCCs) from the affected area and, thereby, assist in delivering a much improved understanding of the actual post-disaster needs of the population (i.e. the demand side of the equation).
In addition, the RPAS can also use a “find my phone” capability in which it can locate cell phones on the ground – and hence, by implication, where an individual or a group of people are situated. It can also support the initiation of a call from, for example, the NDMO to the cell phone that has been located thereby supporting the all-important exchange of information between those affected and the responders.
These recent developments address a challenge that was highlighted by Tatham (2009). In this paper, the author noted that the surveillance capability of an RPAS was unidirectional – thus the operators could only look down onto the affected area. However, the author argued that a bidirectional capability, in which those on the ground could explain and interpret events first hand, would provide significantly more data and lead to improved response decisions. Thus, the ability to drop a satellite phone and/or initiate contact from the NDMO to an individual on the ground has the potential to deliver this improved capability.
Third, as outlined earlier, one of the challenges in responding to Cyclone Pam was the fact that the communications systems to the affected areas were unusable for at least the first 48 hours. To overcome this, the RPAs can fly in a geostationary mode and thereby act as a temporary telecoms relay tower. In doing so, the RPA can provide a short-term replacement for a communications system that has been impacted by the disaster – as was the case in Vanuatu. Furthermore, if the cell tower itself is operational, but for whatever reason it cannot link back to its base station, the RPA can perform this function. This capability is similar to that suggested by Tuna et al. (2014) (see Section 3.1), but the use of an LE-RPAS means that it could be available for a considerable time window of up to eight to ten hours (depending on the transit distance).
Finally, the ability of the RPA to overfly a prospective logistic resupply route would help the NDMO ensure the viability of the proposed road by checking that it is not compromised by fallen trees, landslips or broken bridges, etc. While this capability cannot provide absolute surety that a route is usable – for example, a bridge or culvert may appear sound, but actually be unable to take the weight of a truck – it nevertheless provides a first approximation, and thus has major benefit to the supply side of the equation.
The above list is, clearly, not exhaustive as RPAs can be used for multiple other disaster response purposes including: estimating the extent of flooding or forest fire events, bathymetry following a tsunami or as a means of understanding the damage to harbours, shipping channels, etc., and searching for individuals/ships lost at sea.
Importantly, however, the above benefits of a prospective RPA focus on the technology side of the challenge. To this must be added a “whole-system” perspective and the other two components of the people/processes/technology triangle will be discussed in detail in the next sections.
6. Overview of the process challenges
The OCHA (2014) review of RPAS highlights a number of challenges including the absence of legal frameworks covering RPAS operations and the relatively restrictive nature of those that do exist (e.g. the FAA regulations); ethical issues relating to the fact that the operators of many BLOS (and some less capable) RPAS are primarily military contractors; and privacy issues that reflect the capability of RPAS to observe private property and capture sensitive personal information – noting that, in some countries, it is assumed that RPAS are being operated by domestic security services or foreign powers.
To this list should be added the potential operation of RPAS by military forces, with the associated challenges of civil/military integration/cooperation (Tatham and Rietjens, 2016). In this respect, a recent report by the United States Inspector General of the Department of Defense has indicated that since 28 September 2006 (until 2015) “[…] less than twenty events could be categorized as DoD UAS [Department of Defense Unmanned Aircraft Systems] support to domestic civil authorities. The list consisted of both approved and disapproved requests” (Inspector General Department of Defense, 2015, p. 12). While this represents a surprisingly small number, each occasion will require the implementation of appropriate procedures to integrate the captured data into civilian-managed systems which may/may not be operated by foreign governments.
Overall, the OCHA (2014) report concludes that RPAS operators should attempt to develop a mechanism that provides some form of “informed consent” through, for example, ensuring that the roles, mission timings, areas to be overflown, etc. are cleared in advance with local authorities and publicised. In this context, the report also recommends that operations should be conducted in line with the UAViators Operational Guidelines (UAViators, 2016) which are currently under consideration by the UN/INGO/IFRC communities.
As also indicated in OCHA (2014), there remains a gap in the ability of responding agencies to integrate the results of aerial observations and the associated data collection into needs and damage assessments, search and rescue, and other humanitarian functions. This represents (yet) another example of the overall challenge of achieving greater coordination amongst the large number of governmental, UN and NGO entities that respond to a disaster.
Overcoming this challenge is the subject of broad consideration within the sector including, for example, a recent contribution by Tatham and Spens (2016). In this, the authors draw attention to the model used by the Urban Search and Rescue community. The International Search and Rescue Guidelines (INSARAG, 2015) provide an overarching model for the integration of the work of multiple teams from multiple countries (speaking multiple languages and with multiple cultural norms) using a common process and approach. Importantly, this approach is also being adopted by the World Health Organisation (2013) under their Guidelines for Foreign Medical Teams.
Although at a relatively immature stage, the World Health Organisation (WHO) guidelines on the composition of Foreign Medical Teams are designed to help ensure that the levels of skills, equipment, etc. of such teams are appropriate to the event to which they are responding. In essence, both of these approaches (INSARAG and WHO) are aiming to ensure compatibility between the work of responding agencies. Furthermore, they also provide the ability for an affected nation to reject the assistance of an individual or organisation that does not meet the guidelines/standards. Such an approach would appear to have significant benefit in the future operation of RPAS; however, achieving this will take time.
In a separate, but related, contribution to the resolution of the inter-agency logistic coordination challenge, Tatham et al. (2017) recommend the adoption of a “Common Humanitarian Logistic Picture” (CHLP) to which all agencies contribute and which can form the basis of integrated decision making. Self-evidently, linking the RPAS output to the CHLP would be of considerable value in helping to ensure that response activities are appropriately prioritised and needs based.
However, the current reality is that, although the data that are produced by RPAS are typically geo-tagged or referenced in some manner, there are no metadata standards and therefore the data sets that are produced are often lacking standardised nomenclature or GPS references. These data sets are large – especially if video is captured – and so can actually prove to be more of a burden than a blessing, unless the data management paradigm is set appropriately to cope with the volume of data. The clear implication is that to be efficient and effective (as would be required in an emergency response), the management of RPAS data must be undertaken within proper metadata framework and its associated standards.
Ideally, the multi-scalable RPAS data collection and dissemination would be through the NDMO and, preferably, using a team of GIS/remote-sensing specialists who have already been trained in the handling of RPAS-generated data. Indeed, as is explained in the next section of this paper, in – country capacity building around the use of RPAS and other geospatial data platforms is a key element in leveraging the technical capability of the aircraft and their on-board systems. However, this is a nascent capability that will require appropriate investment to generate. One solution might be the use of mobile teams, but clearly the employment of such a “fly in-fly out” (FIFO) model has multiple challenges and sensitivities that would need to be managed through an ongoing mentorship process.
In terms of the processing of the RPAS data, most can be exported into standard software for subsequent manipulation. However, the end use of the data needs to be succinctly outlined as part of the metadata framework as there is a clear risk to the response if the data overwhelms the system and the information is not appropriately accessible. This will, in part, be driven by the existing systems that are present within the NDMO and CCC, and there may also be concomitant infrastructure-related challenges here that relate to the size/processing capacity of the existing systems.
The final, and key, process-related challenge is that of ensuring that the appropriate permissions are in place that will allow the operation of RPAS in the affected country with a minimum of delay. Given that the operation of RPAS is a novel challenge, and also that international and national air traffic management and safety authorities are struggling to achieve the appropriate balance between such operations and the associated safety/privacy issues, this is clearly the area that is likely to prove critical to the successful operation of RPAS in support of the logistic response.
Ad hoc workarounds have been brought into play – for example, the Mayor of Tacloban is reported to have authorised local RPA flights in the aftermath of the 2014 Typhoon Haiyan (OCHA, 2014, p. 5). However, this is no substitute for the development of an agreed protocol that can be developed and practised in advance of a disaster event and which will support, rather than impede, the RPAS operations described above. As will be discussed in the final section of this paper, it is proposed that this be undertaken using a prioritised approach that will reflect both the likelihood and the impact of any potential disaster in a given country. Work to develop this in the USA is, at least in part, in hand with the recent (February 2016) creation of a committee within the Federal Aviation Administration to construct a framework that details how mini/micro RPAS could be safely flown over people (e.g. crowds) (Association for Unmanned Vehicle Systems International, 2016). Clearly, however, resolutions to such challenges are country specific and so similar investigations will be required to be undertaken in those countries where it is anticipated that RPAS will be operated as part of the disaster response.
7. Overview of the people-related challenges
Taking the proposed RPAS as a whole, there are four distinct people-related areas of focus:
the operation of the RPAS;
the population of the affected country;
the integration, interpretation and analysis of the resultant data in the affected country by responders (e.g. local government, military, NGOs, communities, etc.); and
the integration, interpretation and analysis of the resultant data in supporting countries.
In each case there will be a range of training/education requirements and challenges that will be outlined in this section.
7.1 The operation of the RPAS
In general terms, the operation of the RPAS is likely to be the least challenging of the people-related areas. On the assumption that the aircraft are operated by a reputable commercial organisation, one can reasonably anticipate that the staff will have the necessary skills and expertise to conduct flying operations in a safe, effective and ethical manner, and in line with the air traffic control/safety requirements of the relevant country. Should these not have been developed, then flights could be undertaken in line with the principles of the Humanitarian UAV Code of Conduct and Guidelines (UAViators, 2016) discussed above, overlaid by the experience and expertise of the operators to ensure safe, ethical and effective operations.
7.2 The population of the affected country
While it is difficult to be specific, the general requirement would be for those in the affected country to understand that RPAs may be operated in the aftermath of a disaster. This implies an education or socialisation programme that covers a range of subjects including the risks and safety implications of such operations, the potential benefits and the ways in which both local communities and NDMOs need to be ready to engage.
For example, if it is planned that the RPA will be used to drop a satellite phone for use by those affected in a disaster, the appropriate protocols must be developed and practised in advance. These would include the operation of the phone (and its associated solar battery systems), and the ways in which meaningful information can be passed to the NDMO – for example, by the use of a standardised question and answer system. Clearly, it is entirely possible that a designated local operator may have been impacted by the disaster, and so this knowledge needs to be widely disseminated and, indeed, included as part of the satellite phone delivery package – perhaps in pictorial form in the event that the operator is unable to read or use a different language.
7.3 The integration, interpretation and analysis of the resultant data in the affected country
Given that the capability and modus operandi of the NDMO in each country is likely to differ, it will be essential that the processes for integrating the RPAS data into the NDMO management systems are prepared and exercised in advance of any actual event. Thus, for example, the interpretation of the RPAS data is a sophisticated skill set and this implies that an individual versed in the operation of a particular NDMO (and, indeed, with the appropriate language skills) may need to be engaged in order to ensure that the data are correctly interpreted and integrated with other sources of data – noting that, with the advent of the internet and the growth of social media, this is an escalating challenge. However, as indicated earlier, this presents a significant training challenge, and the alternative of a FIFO model may need to be considered, at least initially.
7.4 The integration, interpretation and analysis of the resultant data in supporting countries
One of the key advantages of an RPAS is that the data it provides can be used in multiple locations. Thus, it is anticipated that the data feeds would not only support the operations in the NDMO of the affected country, but also in countries that are providing direct support. The clear benefit of the input to decision-making from the RPAS data is that it would allow the staff to arrange for the early dispatch of relief goods that are appropriate to the unfolding scenario.
Thus, in the same way as in the local NDMO context, it would be necessary to have the staff available who are versed in the interpretation of the RPAS data, and its integration into the wider disaster management systems of the supporting country, including (as necessary) those of NGOs. At one level, this task would be of a lesser complexity than the local context discussed above as the systems would be more familiar and there should not be any significant language challenges. On the other hand, the complexity of the supporting country’s systems and the potential lack of local knowledge and understanding will require appropriate mitigation strategies.
8. Cost
To date, this paper has made an assumption that the capital and operating costs of an LE-RPA (similar to those discussed in Section 2) are less than those of conventional manned fixed or rotary wing aircraft. Unfortunately, as noted by Mailey (2013), comparable costs are not easy to develop given that there are numerous ways in which the costs/flight hour can be calculated, and that there is no standardised or accepted protocol. Furthermore, to the extent that open-source cost literature does exist (e.g. The Economist, 2009, 2011; Boyle, 2012), the focus is typically on a comparison between high-end military systems such as the Predator, Reaper and Global Hawk vs manned military aircraft such as the F-35. Nevertheless, The Economist (2009) notes that, according to the commander of an Israeli drone squadron, the cost/flight hour in less than 5 per cent of that country’s fighter jets.
In addition, a recent Australian parliamentary investigation (APH, 2015), while supporting the use of RPAS in a disaster response (as distinct from military) context, also clearly indicated that the cost/flight hour metric was potentially over simplistic and misleading when the costs of the support personnel to, for example, manage and disseminate the resulting data are take into account. Indeed, in evidence to this enquiry, Northrop Grumman Australia argued that “[…] up front capital comparisons with manned aircraft are often misleading as they are rarely based on a credible comparable operational metric such as ‘surveillance product per square km’ […]” (APH, 2015, p. 19).
Thus, rather than attempt a potentially flawed comparison, the following observations in relation to the potential use of an LE-RPAS in response to Cyclone PAM are offered in Table VI.
Comparative cost summary
| Item | Commentary |
|---|---|
| Aircraft capital cost | While it has not been possible to obtain definitive data relating to the capital cost of an LE-RPAS, an estimate has been offered by Corcoran (2014) who indicates that in 2013 the capital cost of an Aerosonde Mk 4.7 was some US$100,000. Furthermore, Corcoran (2014) reports that Aerosonde has recently developed a civilian variant of their military-specification RPA which has a lighter airframe and 20% greater endurance at some 60% of the base cost (i.e. US$60,000) |
| Camera cost | In addition, to the cost of the aircraft, that of the camera must be included and this clearly depends on the type (e.g. video v still) and its quality. In general terms, it is understood that a high-quality still camera costs around US$75,000 (Goldberg et al., 2013) |
| Total capital cost | The resultant overall capital cost of a full LE-RPAS with HDS camera is some US$135-175,000. By comparison, Robinson (2016) indicates that a two-seat Raven light helicopter has a capital cost of US$473,400, to which must be added the camera cost |
| Aircrew numbers | The commercial variant of the Aerosonde mentioned above was also reported by Corcoran (2014) as being expected to have fully automated take-off, landing and flight systems enabling a crew size of one pilot, one camera operator and one maintainer. This is broadly similar to the crew size for a small rotary wing aircraft |
| Fuel consumption | The fuel consumption of an LE-RPAS is also extremely low – for example, in August 1998 an Aerosonde Mk 1 flew across the Atlantic in just more than 26 hours on 7 L of fuel (Barnard Microsystems, 1999). However, a broad order consumption figure is understood to be some 0.6 L/h which equates to 0.6 L/100 km at cruising speed. Thus, an indicative 10 h mission time would use some 6 L of unleaded fuel (i.e. costing around US$1-2/h) By comparison, Robinson (2016) indicates that the two-seat Raven light helicopter consumes US$77/h in fuel (based on fuel costing US$5.50/gal and 14.0 gal/h for average use). Thus, even assuming that the Raven could fly non-stop for 12 hours, the fuel costs alone would be some US$900 vs those of the Aerosonde at US$10-20 for a similar flight. Furthermore, given the typical endurance of a medium-range helicopter, the 12 hour mission would require 3-4 separate flights |
| Other costs | While the above elements are perceived to be the key costs for the operation of an RPA, to deliver a full system it would be necessary to include, at minimum, the safety, security, data integration |
Notwithstanding, the above broad order analysis which suggests that the use of an LE-RPAS has significant financial benefits in terms of both capital and operating costs when compared with a helicopter, clearly the latter has a number of advantages, as well as some disadvantages.
First, the cruising speed of a light helicopter such as the Raven is some 200 km/h; in other words, approximately double that of the exemplar LE-RPAs. Thus, the area that can be reconnoitred in a given time window would be significantly greater.
Second, the helicopter is operated by humans and therefore the actual operational task can be adjusted as necessary during the flight. For example, if the initial overview of a particular location indicates that it merits a more detailed inspection, this can be undertaken on an ad hoc basis.
Third, the presence of the human pilot and navigator would make mid-flight changes to the mission easier to accomplish. For example, while the helicopter is airborne, the NDMO might receive additional information that results in the need for change in the flight plan which could be relatively simply implemented.
Fourth, the use of helicopters in a disaster response context is well understood; thus, the challenge of achieving community acceptance should not be a major issue. In comparison, this is a clear area of unfinished business in relation to the humanitarian use of RPAS.
Fifth, helicopters can operate in vertical take-off/landing mode and thus have limited constraints on their launch/recovery locations. By comparison, the operation of LE-RPAS either requires physical space or the deployment of specialised equipment (launch catapult/recovery net) to undertake these activities.
Finally, helicopters have a multi-use capability. Thus, for example, they can operate in casualty evacuation (CASEVAC) or search and rescue (SAR) modes in parallel with the proposed missions outlined in this paper.
On the other hand, and in addition to the endurance and cost issues summarised above, the operation of helicopters is much more weather dependent that the LE-RPAS. As a result, the presence of strong winds and/or low clouds may prohibit helicopter, but not LE-RPAS, operations.
9. Summary and areas of further research
The above conceptual analysis of the benefits of the use of an LE-RPAS clearly demonstrates its potential to support logistic operations in the aftermath of a rapid onset disaster. In addition to the five core capabilities (reconnaissance and mapping, the ability to drop communications equipment, provision of temporary communications, “find you phone” and logistic route surveillance), it also requires far lower capital and operating costs when compared to fixed/rotary wing aircraft, has a short deployment time, can fly in very poor weather conditions and can free up other assets (such as helicopters) for more appropriate activities.
However, operationalising the use of RPAS will, inevitably, require considerable investment, and the following steps represent a proposed way forward.
9.1 Step 1
Select a pilot country (or countries) to act as “pathfinders”. Selection to be based on a combination of the following:
likelihood of being impacted by a future disaster;
potential impact (which will, in part, reflect the development status of the country);
extent to which the country is likely to be supportive of the use of RPAS and has the capability to be able to use the resultant information in a meaningful way; and
geography and topology – i.e. the potential for RPAS to assist in supporting the needs assessment, communications and delivery processes.
9.2 Step 2
The pathfinders and RPAS experts in the various domains (aircraft operations, data handling, air traffic control, risk management etc.) should collaborate to undertake the following activities:
establish appropriate air traffic control protocols to enable RPAS operations;
capture baseline data that will enable downstream impact analysis;
develop the necessary systems to integrate the RPAS operations and associated data feeds into the NDMO (and CCCs) as a basis for efficient and effective decision-making;
conduct appropriate training and education at all levels (community → local government → NDMO and supporting the country’s decision-makers) to facilitate the RPAS operations;
conduct a continuing evaluation of optimum airframe size, payload and endurance – recognising that high payload rotary wing craft are already in production; and
develop appropriate droppable payloads (such as emergency communications systems) that are fit for the purpose.
9.3 Step 3
Conduct live operations on a limited basis in order to evaluate and improve the above people, process and technology-related requirements for safe, effective and efficient RPAS use.
9.4 Funding LE-RPAS operations
Clearly, the above programme represents a significant financial outlay and it is likely, therefore, that it would need to be funded at a governmental level. Thus one might anticipate that governments of developed nations within a region would consider including this within their overall aid budget and cover not only their own costs, but also those of the proposed pathfinder nation(s). Within such a programme, the first step would be to conduct a “proof of concept” demonstration that would enable a more accurate assessment of the potential of LE-RPAS operations. Informal discussions with industry representatives would suggest that a one week trial and demonstration period would cost some US$40-50 K.
9.5 Summary
In summary, it is perceived that the use of LE-RPAS has significant potential to support the logistic response to a disaster. However, a number of important hurdles remain before the concept can be operationalised; the key ones amongst these are the development of an air traffic control regime that supports (rather than constrains) the RPAS use and the mechanisms (both process and people-related) that translate the data from the RPAS into usable information to underpin timely and effective decision-making.
This paper is, as indicated, conceptual in nature and, thus, the argumentation reflects the authors’ analysis of the existing literature in both HL and RPAS fields, amplified by the insights of one member of the team who has considerable practical experience and expertise in the operation of RPAS. Equally importantly, the whole area of RPAS operations is moving extremely quickly, not least reflecting the interest of commercial organisations such as the Amazon (2016) and Domino’s (2016). Although both of these companies are focussing on the use of mini-UAVs (i.e. USDOD Group 1), the lessons identified, and associated developmental activity, in relation to all three aspects of the people, processes and technology triangle are likely to benefit from the efficient and effective operation of LE-RPAS.
It is argued, therefore, that the next critical step in understanding the reality of the potential for LE-RPAS to support the HL process is to undertake a field trial in a controlled (benign) environment through which the reality and magnitude of the challenges can be better understood. Assuming a positive set of results in such a trial, this would enable a more robust plan to be developed and costed, and the resultant proposition given due consideration by governments and the global humanitarian assistance community.
