In this paper, Picard–S hybrid iterative process is defined, which is a hybrid of Picard and S-iterative process. This new iteration converges faster than all of Picard, Krasnoselskii, Mann, Ishikawa, S-iteration, Picard–Mann hybrid, Picard–Krasnoselskii hybrid and Picard–Ishikawa hybrid iterative processes for contraction mappings and to find the solution of delay differential equation, using this hybrid iteration also proved some results for Picard–S hybrid iterative process for nonexpansive mappings.
This new iteration converges faster than all of Picard, Krasnoselskii, Mann, Ishikawa, S-iteration, Picard–Mann hybrid, Picard–Krasnoselskii hybrid, Picard–Ishikawa hybrid iterative processes for contraction mappings.
Showed the fastest convergence of this new iteration and then other iteration defined in this paper. The author finds the solution of delay differential equation using this hybrid iteration. For new iteration, the author also proved a theorem for nonexpansive mapping.
This new iteration converges faster than all of Picard, Krasnoselskii, Mann, Ishikawa, S-iteration, Picard–Mann hybrid, Picard–Krasnoselskii hybrid, Picard–Ishikawa hybrid iterative processes for contraction mappings and to find the solution of delay differential equation, using this hybrid iteration also proved some results for Picard–S hybrid iterative process for nonexpansive mappings.
1. Introduction
Let E be a normed linear space and C be a non-empty convex subset of E. A mapping is called contraction if
for all and .
Let C be a non-empty subset of a normed linear space E and a mapping. Then T is said to be nonexpansive if
A sequence is an approximating fixed point sequence of T if . We say that is a fixed point of T if and denote the set of all fixed points of T.
In this paper, N denotes the set of all positive integers.
The Picard iterative process [1] is defined by the sequence as follows:
The Krasnoselskii iterative process [2] is defined by the sequence :
where .
The Mann iteration [3] is defined by the sequence :
where satisfies certain appropriate conditions.
The Ishikawa iterative process [4] is defined by the sequence :
where satisfies certain appropriate conditions.
S-iterative process [5] is defined by the sequence :
where satisfies certain appropriate conditions.
Many important non-linear problems of applied mathematics are usually constructed in the form of fixed point equation. These problems are related with physical problem of applied sciences and engineering.
The Picard iteration is the simple iteration for approximate solution of fixed point equation for non-linear contraction mapping. Some results based on Picard iteration are introduced by Chidume and Olaleru [6].
Khan [7] introduced the Picard–Mann hybrid iterative process defined by the sequence :
where is a real sequence in .
Okeke and Abbas [8] introduced the Picard–Krasnoselskii hybrid iterative process defined by the sequence :
where .
Okeke [9] introduced the Picard–Ishikawa hybrid iterative process defined by the sequence :
where are real sequences in (0,1). Using hybridization with Picard, now I introduce Picard–S hybrid iterative process defined by the sequence :
where and are real sequences in satisfying condition:
Let and be two fixed point iteration processes that converge to a certain fixed point p of a given operator T. The sequence is better than if
for all (given by Rhodes [10]).
2. Preliminaries
Let and be two sequences of real numbers converging to a and b, respectively. If
Let and be two fixed point iterative processes, both converge to fixed point p of a given operator T. Suppose that the error estimates.
Let X be a Banach space. Then a function is said to be the modulus of convexity of X if
It is easy to see that and for all . References [10–19] dealing with rate of convergence of iterative process. Some authors analyse its stability. We need following lemma to prove result.
Let be a sequence of positive real numbers which satisfies
The aim of this paper is to introduce the Picard–S hybrid iterative process and to show that this new iterative process is faster than all of Picard, Krasnoselskii, Mann, Ishikawa in sense of Berinde [20], S-iteration in sense of Agarwal [5], Picard–Mann hybrid in sense of Khan [7], Picard–Krasnoselskii hybrid in sense of Okeke [8] and Picard–Ishikawa hybrid in the sense of Okeke [9].
Okeke already proved that Picard–Krasnoselskii hybrid iterative process converges faster than Picard, Krasnoselskii, Mann and Ishikawa. Khan [7] proved that Picard–Mann hybrid iterative process converges faster than Picard, Mann, Ishikawa iterative processes. Therefore, I show that my new Picard–S hybrid iterative process converges faster than S-iteration, Picard–Mann hybrid iteration, Picard–Krasnoselskii hybrid iteration and Picard–Ishikawa hybrid iterative process in the topic Rate of Convergence. In 2020, Zhao [21] proved existence and uniqueness of pseudo almost periodic solution for a class of iterative functional differential equations with delays depending on state. In next section, I find the solution of delay differential equation using Picard–S hybrid iterative process. Aynur Sahin [22] proved some strong convergence results of Picard–Krasnoselskii hybrid iterative process for a general class of contractive-like operator in hyperbolic space. In next section, I prove some results of Picard–S hybrid iterative process for nonexpansive mappings in uniformly convex Banach space.
3. Rate of convergence
Let C be a non-empty closed convex subset of a normed space E and let T be a contraction of C into itself. Suppose that each of the iterative process 1.6, 1.7, 1.8, 1.9 and 1.10 converges to the same fixed point p of T where and are sequences in (0.1) such that , for all and for some λ and is a Lipschitz constant for contraction mapping T. Then Picard–S hybrid iterative process defined by (1.10) converges faster than all the other four iterations.
Proof: Suppose that p is the fixed point of the operator T. Using (1.1) and S-iterative process (1.6), we have
Now compute the rate of convergence of Picard–S iterative process (1.10) as follows:
Thus, converges faster than to p, i.e. the Picard–S hybrid iterative process (1.10) converges faster than the S-iterative process:
Thus, converges faster than to p, i.e. the Picard–S hybrid iterative process (1.10) converges faster than the Picard–Mann hybrid iterative process.
Thus, converges faster than to p, i.e. the Picard–S hybrid iterative process (1.10) converges faster than the Picard–Krasnoselskii hybrid iterative process.
Thus, converges faster than to p, i.e. Picard–S hybrid iterative process converges faster than Picard–Ishikawa hybrid iterative process. This completes the proof of the proposition.□
In [8], Okeke proved that the rate of convergence of Picard–Krasnoselskii hybrid iterative process is faster than Picard, Krasnoselskii, Mann and Ishikawa iterations. Agarwal et al. [5] proved that S-iteration converges faster than Picard, Krasnoselskii, Mann and Ishikawa iterative processes, and Okeke [9] proved that rate of convergence of Picard–Ishikawa hybrid iterative process is faster than Picard–Mann hibrid and Picard–Krasnoselskii iterations. Therefore, I give an example to show that rate of convergence of Picard–S hybrid iterative process is faster than Picard–Mann hybrid, Picard–Krasnoselskii hybrid and S-iteration. This will show that Picard–S hybrid defined by (1.10) converges to fixed point faster than all other iterations defined in this paper.
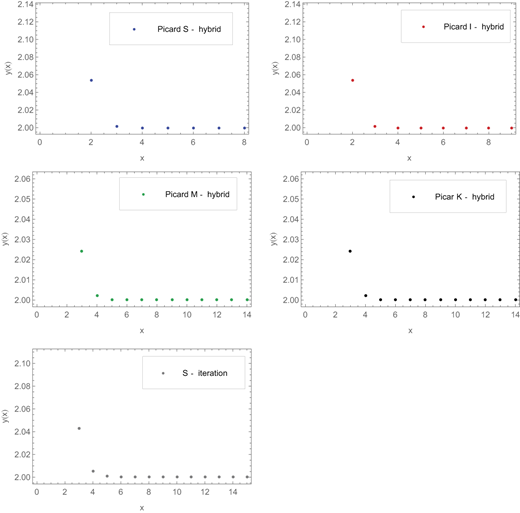
Let and and be an operator defined by for all . Choose for each with initial value . For , T is a contraction mapping. All the processes converge to the same fixed point 2. It is clear from Table 1 and graphs that our Picard–S hybrid iterative process converges faster than Picard–Ishikawa hybrid, Picard–Mann hybrid, Picard–Krasnoselskii hybrid and S-iteration.
A comparison of Picard–S hybrid with other iterative processes
| Step | Picard–S hybrid | Picard–Ishikawa hybrid | Picard–Mann hybrid | Picard–Krasnoselskii hybrid | S-iteration |
|---|---|---|---|---|---|
| 0 | 5.0000000000000 | 5.0000000000000 | 5.000000000000 | 5.000000000000 | 5.000000000000 |
| 1 | 2.053665985829 | 2.053665985829 | 2.251284354073 | 2.251284354073 | 2.330713309124 |
| 2 | 2.001174310362 | 2.001174310362 | 2.024068969098 | 2.024068969098 | 2.042698929425 |
| 3 | 2.000024999687 | 2.000024999687 | 2.002336639386 | 2.002336639386 | 2.005602850705 |
| 4 | 2.000000433332 | 2.000000549760 | 2.000227141158 | 2.000227141158 | 2.000738954904 |
| 5 | 2.000000009450 | 2.000000012089 | 2.000022082864 | 2.000022082864 | 2.000097495596 |
| 6 | 2.000000000207 | 2.000000000265 | 2.000002146942 | 2.000002146942 | 2.000012863908 |
| 7 | 2.000000000000 | 2.000000000005 | 2.000000208730 | 2.000000208730 | 2.000001697319 |
| 8 | 2.000000000000 | 2.000000020293 | 2.000000020293 | 2.000000223951 | |
| 9 | 2.000000001973 | 2.000000001973 | 2.000000029549 | ||
| 10 | 2.000000000191 | 2.000000000191 | 2.000000003898 | ||
| 11 | 2.000000000018 | 2.000000000018 | 2.000000000514 | ||
| 12 | 2.000000000002 | 2.000000000002 | 2.000000000067 | ||
| 13 | 2.000000000000 | 2.000000000000 | 2.000000000008 | ||
| 14 | 2.000000000000 |
4. Application to delay differential equation
Here, I use this new Picard–S hybrid iterative process to find the solution of delay differential equations.
Let be a space of all continuous real valued function on a closed interval [a, b] be endowed with the Chebyshev norm:
Space is known as Banach Space. In this section, the following delay differential equation has been taken:
with initial condition
By the solution of above problem, we mean a function satisfying (4.1) and (4.2). Assume that the following conditions are satisfied.
;
;
;
such that
;
Coman [23] et al. established the following result.
Using Picard–S hybrid iterative process, I prove the following result.
Proof: Let be an iterative sequence generated by the Picard–S hybrid iterative process (1.10) for an operator defined by
Let p be a fixed point of T, now I prove that as . It is easy to see that for each . Now for each , we have
Now,
Now,
Now,
Using (4.6) in (4.7), we get
From (4.5) we get
Note that and . Thus, all conditions of lemma 2.1 are satisfied. Hence, . This completes the proof of above theorem.□
5. Picard–S hybrid iterative process for nonexpansive mappings
Let E be a normed space, C a non-empty convex subset of E and a nonexpansive mapping. If is the iterative process defined by (1.10), then exists.
Proof: Set an = xn − Txn for all . Then we have
Now,
Now,
Now,
So that is nonincreasing and hence, exists.□
Let C be a non-empty closed convex (not necessary bounded) subset of a uniformly convex Banach space X and a nonexpansive mapping. Let be the sequence defined by (1.10) with the restriction:
Then, for arbitrary initial value converges to some constant , which is independent of the choice of the initial value .
Proof: Lemma (5.1) implies that exists and denote . Let be another iterative sequence generated by (1.10) with the same restriction on parameters and of iteration as the sequence but with the initial value . It follows from lemma (5.1) that
Observe that
Now
This shows that exists.
Let for some .
Let
Since
It follows from (5.14) that
This gives us
Or
Using restriction and .
Therefore,
is strictly increasing and continuous and .
We have
Observe that
which implies that
Thus, . Because
for all and
It follows that
□