– The purpose of this paper is to present a conceptual framework for a hybrid simulation model that can be used to study the decision making and behaviors of humanitarian logistics actors to determine how/whether certain coordination mechanisms enable better relief chain efficiency and effectiveness over time.
– The agent-based portion of the model is used to represent human decision making and interactions in a more realistic way than has been done previously, and the discrete-event simulation (DES) portion of the model allows the movement of vehicles, materials, and information throughout a supply network to be represented in a way that allows for dynamic and stochastic behavior.
– Coordinated efforts by actors in humanitarian logistics operations involve complex interactions and adaptations over time, which can be capture and explored via hybrid agent-based model (ABM)-DES modeling.
– This paper describes a framework for a hybrid ABM-DES model. The actual development and implementation of the model, including input data collection and analysis, model development, experimentation, and output data collection and analysis, will be the subject of future work.
– The hybrid model framework provides other researchers with a starting point for model development.
– This paper provides a basis for future modeling and assessment of coordination in humanitarian logistics, an area that is in need of research.
– The hybrid simulation modeling framework presented in this paper is a novel application of a new modeling methodology to the problem of coordination in humanitarian logistics.
1. Introduction
The procurement, warehousing, and transportation activities and infrastructure that are associated with acquiring and distributing relief materials are the primary components of a relief effort, with logistics making up 80 percent of humanitarian operations (Van Wassenhove, 2006). With increasingly scarce funding and resources available for humanitarian relief efforts but ever-increasing need, improving the efficiency and effectiveness of these logistics efforts has great potential, in terms of such key performance measures as the number of aid recipients served, the quality of aid that they receive, and the total operational cost of providing relief. Adapting conventional supply chain management mechanisms and best practices from commercial supply networks to improve humanitarian relief chains has been an area of research focus. Examples of such practices include efficient resource allocation via optimized procurement techniques, third-party warehousing, warehouse standardization, collaborative procurement and transportation, resource sharing, inventory pooling, and information integration among supply chain actors (Ertem et al., 2010; Balcik et al., 2010; Van Wassenhove and Pedraza-Martinez, 2012).
Of all the supply chain management methods available, mechanisms that enable better coordination of material and information flows between humanitarian relief chain stakeholders are among the most important, enabling actors with diverse expertise and capabilities to share the efforts effectively, to everyone’s mutual benefit (Balcik et al., 2010; Dolinskaya et al., 2011). A coordination mechanism is defined as a set of methods used to strategically manage interdependence between organizations (Xu and Beamon, 2006). Such mechanisms enable coordinated activity and teamwork throughout the relief chain by facilitating high levels of communication and collaboration among actors (Thevenaz and Resodihardjo, 2010). These actors can be within the same echelon (i.e. multiple international NGOs), in which case the mechanisms enable horizontal coordination; or they might be in different echelons (i.e. international donors and local NGOs), and in this case the mechanisms support vertical coordination. Regardless, for the coordination to be successful, it should benefit all of the coordinated actors, as well as the overall relief chain, in terms of improved effectiveness and efficiency.
There are a variety of mechanisms by which both horizontal and vertical coordination can be implemented in relief chains. Mechanisms that coordinate material flows are often employed with an aim of reducing logistics costs, thereby enabling organizations with limited budgets to reach more aid recipients, and to reach them more quickly. For example, joint procurement of relief supplies allows organizations to make higher-volume purchases, thereby increasing their collective bargaining power and reducing purchasing costs for each participating organization. Similarly, collaborative transportation is a coordination mechanism in which multiple organizations pool their transportation resources (e.g. aircraft, vehicles, cargo containers) for increased capacity utilization. Collaborative transportation can reduce freight costs for each participating organization and can enable more efficient use of a limited pool of vehicles in the post-disaster environment. This mechanism can be applied to global long-haul transport of relief supplies, as well as last-mile shipments. Warehousing capacity can also be shared among multiple organizations at various echelons of the relief chain, thereby increasing storage capacity utilization and enabling the costs of material handling labor and equipment, as well as warehouse security, to be shared. All of these techniques for coordinating material flow have been used to good effect in humanitarian relief chains (Balcik et al., 2010).
Mechanisms that coordinate the flow of reliable, appropriate, and timely information among relief organizations can also be extremely beneficial to relief chain participants. Such information sharing can occur during the disaster preparedness phase, as well as during disaster response operations. In the pre-disaster phase, inter-organizational learning via sharing operational successes/challenges, best practices, and innovative approaches will increase the likelihood that the knowledge gained from previous disasters will be used to improve future relief operations (Moshtari, 2013). During the post-disaster relief effort, the diffusion of information horizontally and vertically throughout the relief chain can strengthen the effort by increasing the feasibility and likelihood of coordination, thereby avoiding duplicated efforts, wasted resources, and misdirected actors (Thevenaz and Resodihardjo, 2010). A centralized knowledge base that is accessible through a virtual network could provide a platform for collecting and sharing such vital information (Zhang et al., 2002). Existing information-sharing platforms, such as irinnews.org (Humanitarian News and Analysis), ReliefWeb.org, and Logistics Support Systems can be invaluable during both pre-disaster and response phases, allowing many different organizations and stakeholders to share information, develop relationships, make informed decisions quickly and transparently, and improve collaboration (Moshtari, 2013). Electronic data interchange is an information-sharing mechanism that can support supplier-buyer alliances such as quick response, continuous replenishment, and vendor-managed inventories, all of which can reduce the likelihood of inventory stockouts and lower the transaction costs associated with sourcing and ordering materials (Balcik et al., 2010).
However, Kovacs and Spens (2009) recognize collaboration and coordination among relief chain actors as one of the most difficult challenges to overcome in humanitarian logistics. Balcik et al. (2010) identify a number of contributing factors to this difficulty that are inherent to the humanitarian relief domain, including: competitiveness among actors (especially in an effort to attract and secure donor funding), high uncertainty and incomplete information, imbalances between the demand and supply of relief materials and logistical resources, and prohibitive coordination costs. In addition to these obstacles, the urgency of disasters allows very limited time to establish relationships among coordinating actors, and during the disaster preparedness phase, funds for investing in strengthening such relationships are often unavailable or earmarked for other purposes (Dolinskaya et al., 2011; Moshtari, 2013). Without strong relationships and a history of shared experiences to provide a feeling of interdependence, shared responsibility, and a common mission (i.e. saving lives, reducing human suffering, restoring communities, and infrastructure), organizations tend to view themselves as autonomous actors and focus on short-term and myopic objectives, in which their own survival (i.e. maintaining a sufficient flow of donor funds to continue and/or expand operations) may become more important than system-wide success (Kovacs and Spens, 2009). Another consequence of underdeveloped relationships between relief organizations is a lack of mutual trust (Tatham and Kovacs, 2010). In the absence of trust, formal agreements and contracts can help to preserve relationships, but such agreements among actors in the relief chain are uncommon, and this inhibits a systematic allocation of costs, benefits, and risks (Dolinskaya et al., 2011). Power imbalances can lead organizations to avoid sharing information in an effort to maintain a competitive edge and to maintain their autonomy, but even if the organizations are willing to share information, it may be difficult or infeasible due to data formatting diversity and incompatibility (Zhang et al., 2002).
Another frequently mentioned challenge to coordination in humanitarian logistics involves the number and diversity of actors in the relief chain. In their review of the current trends and challenges in the literature on humanitarian logistics research, Leiras et al. (2014) identified a particular need to study the perspectives and interactions among multiple stakeholders in the relief chain. Given that hundreds of organizations may be involved in the relief effort for a single disaster, the importance and the complexity of considering multiple perspectives is clear. Unfortunately, while diversity is a strength and an advantage of coordinated efforts, it can also impede collaboration (Dolinskaya et al., 2011). The different objectives, motives, backgrounds, and constraints of these numerous and varied actors can greatly complicate coordination efforts, especially because relief chains are unregulated, with no single centralized umbrella organization having the authority to influence other actors to engage in coordination activities (Balcik et al., 2010). Finding ways to align all of these actors toward a common purpose without compromising their individual organizations’ mandates and beliefs is a critical but extremely difficult task (Van Wassenhove, 2006).
Iakovou et al. (2014) also emphasized the importance of coordination in improving efficiency in humanitarian relief chains but identified that the relevant literature is “rather limited and mostly qualitative.” Some models exist that assist decision makers with respect to coordinated procurement methods, with an emphasis on optimizing bidding strategies (Trestrail et al., 2009) and developing strategies to hedge against demand uncertainty (Falasca and Zobel, 2011). However, there are no quantitative models that enable researchers to assess the effects of the implementation of different coordination mechanisms on key relief chain performance measures over the long term. In particular, a methodology that would enable the study of dynamic interactions among diverse, boundedly rational, and autonomous relief chain actors, as well as their decision-making processes with respect to coordination, would be very valuable. Such a tool would be able to capture both the individual human and overall system elements of humanitarian logistics operations that make coordination so challenging. It would allow relief chain actors to perform scenario analyses to evaluate the risks/benefits of different coordination strategies, thereby informing their selection of appropriate coordination mechanisms and partners, given specific types and characteristics of the disaster and the actors involved.
This paper describes some of the challenges and benefits that are associated with accommodating realistic human and system behavior into relief chain models, and then describes a new modeling methodology (hybrid simulation) that can potentially overcome these challenges. A conceptual hybrid simulation model of a theoretical humanitarian logistics operation is presented, in which three different types of participating organizations at different echelons of the relief chain are represented by autonomous simulated agents. The model enables different types of vertical and horizontal coordination mechanisms to be examined to assess their impacts on relief chain efficiency and effectiveness.
2. Modeling decision making and coordination in relief chains
Capturing the heterogeneity of actors’ capabilities, objectives, and preferences in the humanitarian relief chain, and realistically representing their decision-making processes with respect to coordination, are critical elements of modeling coordination efforts. Additionally, the complex system-wide effects of individual actors’ decisions about how, with whom, and to what extent they should coordinate should be captured. This section describes the challenges and the benefits of incorporating these factors into models of human decision making and interactions in humanitarian logistics systems.
2.1. Bounded rationality of participants
The traditional framework for modeling how humans make decisions is known as rational choice theory, in which it is presumed that decision makers can be characterized by their preferences, and that these preferences allow them to evaluate and choose optimally among different alternatives. Rational choice theory has long been established as the predominant framework used by social scientists to model human behavior. However, perfectly rational decision making requires the acceptance of several simplifying assumptions, including the availability of perfect information, unlimited computational capabilities of decision makers, perfect agreement among multiple stakeholders, and the existence of a known and describable optimal course of action that maximizes the expected value of a decision maker’s objective function (Chelst and Canbolat, 2012). These assumptions define a normative model of human behavior and do not accurately reflect the context in which people actually make decisions, in which information is often incomplete and of uncertain quality, and there are insufficient resources and time to explore the entire decision problem solution space. In reality, humans rarely make strictly rational decisions (Tversky and Kahneman, 1974).
To account for these discrepancies between humans’ normative and actual behavior with respect to decision making, the seminal work by Simon (1955) introduced the concept of “bounded rationality.” Bounded rationality is a concept that suggests a more realistic alternative to rational choice theory, allowing for the inherent imperfections in human decision making, including incomplete knowledge of their alternatives, limited computational abilities, and the mental “shortcuts” that humans tend to take when faced with a complex decision. These shortcuts, known as heuristics, are simple rules of thumb that decision makers use when they are unable (or unwilling) to attempt to find an optimal solution to their decision problem. Simon (1955) proposed that humans tend to “satisfice,” rather than optimize, in their search for alternatives that are satisfactory.
Individuals and organizations in both commercial and humanitarian supply chains typically do not actually follow normative models of decision making; instead, the use of heuristics and satisficing behavior is commonly observed (Siebers et al., 2010). Su (2008) identified multiple examples in which biases in supply chain management decision making (e.g. fairness and framing biases) led to sub-optimal results, including high inventory carrying costs as a consequence of the bullwhip effect. Given that humans and organizations in a supply chain are subject to bounded rationality when they make complex decisions, it is appropriate to include this element in supply chain models, including models of the distribution of humanitarian aid. Failing to capture decision-making processes accurately and realistically in a model increases the risk of producing misleading results. However, most models of human behavior continue to rely upon rational choice theory and do not account for bounded rationality (Johnson, 1998). Incorporating bounded rationality in these models can be challenging, particularly in ensuring that the modeled heuristics match the mental shortcuts that humans actually utilize (North and Macal, 2007).
2.2. Relief chains as complex adaptive systems (CAS)
In addition to realistically representing the decision-making processes of individuals in a relief chain, a modeler is faced with the challenge of capturing the complex system behavior that arises as a result of these individual actions. A CAS is a system of interconnected autonomous entities that make choices to survive and, as a collective, evolves, and self-organizes over time (Pathak et al., 2007). A CAS is characterized by complex behaviors that arise as the result of nonlinear spatio-temporal interactions among a large number of components, in which highly structured collective behavior emerges over time from the interaction of these components without any centralized control (Surana et al., 2005). A CAS changes inputs to outputs in a nonlinear way because its components interact with one another via a web of feedback loops (Anderson, 1999). In such nonlinear systems, slight changes to just a few parameters and/or individual entities can drastically change the behavior of the overall system, which can be very different from the sum of the parts (Anderson, 1999). CAS frameworks have been applied to the study of biological and social systems, and more recently to supply chains in the manufacturing and service sectors. CASs change and reorganize their component parts to adapt themselves to challenges in their environment, which makes these systems difficult to understand and control (Holland, 1992).
The seminal article by Choi et al. (2001) frames a supply network as a CAS and provides a detailed mapping of each property of a CAS to a supply network. For example, one characteristic of a CAS is self-organization through simultaneous and parallel actions of multiple agents. This property is shared with a supply network, which emerges with no one firm deliberately organizing and controlling it (Choi et al., 2001). Moyaux et al. (2006a) identify that supply chains are composed of heterogeneous, autonomous organizations gathered in large dynamic coalitions, wherein each organization pursues individual goals while satisfying local and global constraints, which is also true of CASs. These constituent organizations exhibit adaptivity and exist in a complex environment with a large number of relationships and interactions, as with a CAS (Pathak et al., 2007). A supply chain is a complex and dynamic network of interrelationships among firms that are constantly in flux, exhibiting unpredictable nonlinear system behaviors (North and Macal, 2007), which emerge from local decisions that are typically based on imperfect local knowledge (Moyaux et al., 2006a; Swaminathan et al., 1998). A well-known example of such unpredictable supply chain behaviors is the bullwhip effect, an emergent phenomenon that results from imperfect local knowledge informing the interactions among supply chain members (Surana et al., 2005).
While it is known that supply chains can be framed as CASs, modeling them as such is challenging for several reasons detailed by North (2014): averages often fail to properly represent these systems; decision makers are heterogeneous and adaptive, and they therefore must be modeled individually and dynamically; models typically include large numbers of decision makers; and nonlinear system behavior is often observed, so specific decision maker attributes must be tracked against relevant thresholds. As a result, neither a commercial supply chain nor a humanitarian logistics system can be modeled as a CAS by employing traditional mathematical modeling methods.
3. Simulation modeling methodologies
While traditional modeling methodologies struggle with the realistic representation of human decision making and system complexity, agent-based modeling is a technique that is well suited to this task. However, it is not designed to model the flows of material through a system over time, which the study of a humanitarian logistics operation necessitates. This type of system behavior is better represented by discrete-event simulation (DES) modeling. In this section, agent-based modeling is described, and its potential for application to humanitarian relief chains is discussed. DES is then explained and compared to agent-based modeling, and finally, the combination of the two methods into a hybrid simulation modeling tool is described.
3.1. Agent-based modeling
Agent-based models (ABMs) are computer simulation models in which “agents” are unique and autonomous entities that can interact with each other and their environment locally (Railsback and Grimm, 2012). The agents in an ABM are intelligent (i.e. they have internal logic) and are capable of making complex decisions while engaging in complex interactions with other agents and objects within their environment. Agents are affected by their environment and can also act in ways that affect their environment. ABM also gives agents the capacity to “learn” from their environment over time and adapt their behaviors accordingly to meet their design objectives under dynamic conditions (Wooldridge, 2002).
ABMs can portray highly realistic representations of real-life systems by including important processes and relationships that are too complex to include in simpler models (Bonabeau, 2001; Railsback and Grimm, 2012). The ability to design models that can incorporate agents’ bounded rationality is one of the most appealing aspects of ABM (Epstein and Axtell, 1996; Axelrod, 1997). Collectively, the agents make up a complete system, wherein some agents may be more influential than others, but none completely controls the behavior of the system (North and Macal, 2007). ABMs enable scientists to study systems that exhibit emergence, which is system behavior that arises from, and is linked to, the characteristics and behaviors of its individual components – that is, ABM enables the study of CASs.
When a supply chain is framed as a CAS, a key challenge in its design and management is determining what individual agent strategies lead to desired collective behavior; as such, DES (rather than analytical techniques) has been the primary tool for supply chain analysis (Surana et al., 2005; Pathak et al., 2007). However, ABM is designed to address many of the drawbacks of DES, such as its inability to capture changes in system structure over time (North and Macal, 2007). ABM provides a means of capturing complex cause and effect, nonlinearity, ambiguity, and dynamism (Pathak et al., 2007), all of which are inherent in supply chain behaviors. Because supply chain management is fundamentally concerned with coherence among multiple decision makers, an ABM framework based on explicit communication among agent members is an effective method of analysis (Swaminathan et al., 1998).
In an ABM of a supply chain, agents are decision-making members that interact with other supply chain agents (e.g. receiving shipments/orders) and then make decisions (e.g. deciding how much to order/ship) based on their decision rules and information from their environment (North and Macal, 2007). ABM allows modelers to consider nontraditional factors in supply chain decision problems, such as behavioral and social factors, and it allows modelers to consider basing supply chain agent decisions on trust and the establishment of sustaining relationships – for example, trust is increased if suppliers consistently fill orders on time, and vice versa (North and Macal, 2007). With ABM, it is straightforward to represent the ways in which supply chain actors actually make decisions (e.g. choosing demand forecasting techniques, determining when to order inventory, supplier selection methods), rather than relying on unsubstantiated normative assumptions (Siebers et al., 2010).
A major advantage of using ABM to model humanitarian logistics coordination lies in its ability to represent interactions among autonomous agents and the emergent system behavior and structures that result. In particular, ABM has been used to study coordination and cooperation in supply chains, with a focus on the value of and conditions for information-sharing among agents. For example, Strader et al. (1998) develop an ABM to study the impact of different information-sharing strategies on order fulfillment cycle time and inventory cost in a supply chain. Moyaux et al. (2006b) also develop an ABM to study different information-sharing strategies, in which the supply chain agents are complex decision makers that select the strategy that maximizes their utility, where utility is a convex combination of inventory holding costs and backorder costs.
In the literature, there are many ABMs of evaluation route planning in the event of a quick-onset disaster, particularly for floods. For example, Liu et al. (2008) developed an ABM to assess the total time required for flood evacuation, using agents to account for the differences in human evacuation behavior, as a result of different walking speeds and degrees of familiarity with the area. Their model provided insight into the impact of different distributions of agent types on system behavior, as well as which strategies were best for reducing overall evacuation time. Dawson et al. (2011) developed a hybrid model of flood management that couples an ABM of evacuee traffic behavior with a hydrodynamic model. Santos and Aguirre (2004) review simulation models, including ABMs, for evacuation from fires. They indicate that most of these models do not incorporate human and social behaviors. Pan et al. (2007) developed an ABM to study the occurrence of “nonadaptive” (i.e. dangerous) crowd behavior during emergency evacuations. Their model includes boundedly rational agents, who exhibit such characteristics as competitiveness in their efforts to evacuate.
A few ABMs for humanitarian aid are described in the literature. Salgado et al. (2010) developed an ABM to test different policies for the prevention of crime and looting after a disaster. Crooks and Wise (2013) created an ABM coupled with a GIS to assess the distribution of aid among various relief centers in the wake of the 2010 Haiti earthquake. In their model, the agents are aid recipients who travel around the affected area in search of relief centers with food inventory. If they meet, they can communicate with one another and can share their knowledge about the locations and inventory availability of the centers; however, the information that they share may not be accurate (i.e. a center that is believed to have inventory may have stocked out). There are very few ABMs of humanitarian logistics operations in the literature. Das and Hanaoka (2014) developed an ABM of vehicle fleet allocation in which five different stakeholders with diverse objectives are represented as agents. This model incorporates the multi-criteria decision-making tool TOPSIS.
3.2. DES
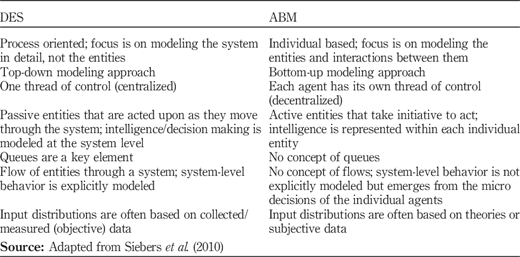
ABM is well suited to capturing the elements of bounded rationality that characterize decision makers in relief chains, as well as the complex nature of a system of interacting and autonomous actors in a humanitarian logistics operation. However, ABM is not a particularly useful tool for modeling some of the important features of the relief chain, such as material flows, transportation, inventory staging, and queueing for resources (Siebers et al., 2010). By contrast, DES is highly effective at modeling distribution networks and logistics operations (Kelton et al., 2002). DES is a computer simulation tool that can be used model systems that are characterized as discrete (i.e. the system state changes at discrete points in time), dynamic (i.e. time is a critical component of the system’s behavior), and stochastic (i.e. the system’s behavior is determined by one or more random variables) (Law and Kelton, 2000). DES models are most useful when the system under study can be characterized by varying states, and events occur that change the value of these variable states in some rule oriented but stochastic manner (Dooley, 2002). DES can be used to solve complex problems for which deriving analytical solutions are not feasible, as well as for testing a variety of “what-if” scenarios on a system without experimenting on the system directly (Kelton et al., 2002). Table I provides a comparison of main characteristics and uses of DES models with ABM.
Although DES has been used frequently to model commercial supply chains (Banks et al., 2002), there is very little existing literature in which it has been applied to humanitarian logistics operations. Iakovou et al. (2014) developed a DES model of a humanitarian logistics operation to compare single and dual emergency sourcing strategies for slow-onset disasters, where dual-sourcing is used as a risk-mitigation strategy. This model was used to evaluate both strategies in terms of total system cost, expected time to system recovery, and average time that the system experiences backorders, and results indicated that dual-sourcing provided an effective means of improving the system for all three of these performance measures.
3.3. Hybrid ABM-DES modeling
In order to integrate human decision making with the capabilities of DES, DES has been combined with ABM to form hybrid simulations (Huanhuan et al., 2013). Hybrid simulation leverages each individual methodology’s strengths and enables the analysis of systems that could not be realistically modeled using a single approach (Powell and Mustafee, 2014; Zulkepli et al., 2012). Hybrid ABM-DES is a relatively new modeling methodology. The literature suggests that it is a growing trend, but that the concept is still in early stages of development (Eldabi et al., 2008). One example from the rather sparse literature is a hybrid ABM-DES model of patients in a clinic in the UK that was used to incorporate patient interactions into the clinic’s queuing problem (Brailsford et al., 2013); another example describes a hybrid ABM-DES model of receiving operations in a regional food aggregation center, which was used to study the impacts of supplier delivery scheduling on overall system performance (Mittal and Krejci, 2015). Hybrid simulation has been used to simulate transportation evacuation systems (Zhang et al., 2011). It has also been used to simulate a disaster response system, in which a combined GIS and DES modeled the flow of emergency response vehicles, and rule-based responder agents followed simple decision rules via ABM (Wu et al., 2008).
Various simulation modeling techniques have been used in the area of supply chain management and logistics, but most of these techniques have been used in isolation (Mustafee et al., 2015). A hybrid simulation model that incorporates both ABM and DES would provide the benefits of both methodologies in assessing coordination mechanisms and strategies in humanitarian logistics. The ABM would enable the human decision making, interactions, and adaptations over time with respect to coordination to be captured. The DES would allow for the flow of relief materials, via different transportation modes, throughout the relief supply network to be captured, and the effectiveness of the system assessed over time.
4. Conceptual hybrid ABM-DES simulation model of humanitarian logistics operations
In this section, a conceptual hybrid simulation model of humanitarian logistics operations will be described, including an ABM component, a DES component, and the hybrid combination of the two. This model provides a small-scale theoretical example of how the hybrid ABM-DES modeling methodology can be used to study the behavior of interacting and coordinating relief organizations in the preparedness and response phases of a disaster.
4.1. ABM
A conceptual ABM of relief chain actors was developed using NetLogo (v. 5.0.5). This model will be described using the ODD (Overview, Design concepts, and Details) protocol. This protocol was developed to standardized published descriptions of ABMs, and its structure has been widely applied in the ABM research community (Grimm et al., 2010). The first section of the ODD provides an overview of the ABM.
Purpose
The purpose of this model is to study the decision making and interactions of humanitarian logistics actors in the disaster preparedness (i.e. pre-disaster) phase. In particular, this model is used to determine how relief chain performance (in terms of units of demand filled per dollar spent on shipping costs) impacts donor resource allocation decisions and NGO coordination decisions. The model represents the process of horizontal and vertical coordination mechanism development among international and local NGOs. Two specific mechanisms are implemented in this model: transportation coordination and information sharing.
Entities and state variables
The model contains three different types of agents: donors, international NGOs (INGOs), and local NGOs (LNGOs). The agents are characterized using parameters with values that do not change over the course of the simulation (e.g. NGO’s ability to assess regional demand for relief supplies), as well as state variables that may update over time as agents gather new information and adapt (e.g. donor assessment of NGO logistics performance):
Donors: the ABM contains four identical donor agents. During the response phase of a disaster (which is represented in the DES model), these donors provide relief supplies to the NGOs to be allocated, transported, and delivered to the affected regions. In the ABM, the donor agents assess the logistics performance of the NGOs in the most recent previous disaster and use this assessment to inform their decisions about what percentage of their donations will be allocated to each NGO. Their assessment is based on the NGO’s relative “prestige” (p i), which is the ratio of the amount of demand that was successfully filled by the NGO in the most recent previous relief operation (in relief supply units) to the NGO’s total shipping costs (in dollars), divided by the sum of the prestige values of all NGOs in the system.
International NGOs: there are two identical INGOs in the model. Each INGO agent is characterized by its prestige, its satisfaction with its own performance, and its coordination strategy. The values of these attributes are updated during the preparedness phase between disasters. As previously mentioned, prestige depends upon the INGO’s logistics performance in the previous disaster and determines its relationship with donor agents. Each INGO assesses its satisfaction with its performance in the most recent disaster, compared with its performance in previous disasters and relative to the performance of the other NGO agents. If the INGO is unsatisfied with its performance, it will change its coordination strategy in an effort to improve its performance in future relief operations. If an unsatisfied INGO is currently a member of a coordinated group, it will leave the group; if it is currently operating independently, it will seek out coordination partners. The new coordination strategy will then be implemented in the next disaster response phase. During the response phase, it is assumed that these INGOs have very limited knowledge about the levels of unfilled demand for relief supplies in different regions of the disaster-affected area.
Local NGOs: there are two identical LNGOs in the ABM, which are very similar to the INGOs – their behavior is governed by their current levels of performance and satisfaction, as well as their chosen coordination strategy. However, unlike the INGOS, they are assumed to have perfect knowledge of each affected region’s demand for relief supplies throughout the disaster response phase. This characteristic is based on the assumption that locally situated NGOs are more familiar with the current conditions in the affected area, although in real-life relief operations, no actor will actually have perfect knowledge of demand.
Process overview and scheduling
The ABM represents the preparedness phase that occurs between disaster response phases. Each time the ABM is executed, the donor agents first evaluate each INGO and LNGO agent’s prestige values. The donor agents use these prestige values to inform the allocation strategy that they will employ in the next response phase. Each NGO then determines whether it is satisfied or unsatisfied with its logistics performance in the previous response phase. If an NGO is satisfied, it will maintain its current coordination strategy. If it is unsatisfied, it will update its current coordination strategy. Unsatisfied NGOs that are currently members of coordination partnerships will leave these groups and decide to operate independently in the next response phase. Unsatisfied independent NGOs will seek coordination opportunities with other unsatisfied NGOs – it is assumed that satisfied NGOs will not accept new coordination partners. Further, it is assumed that the development of a coordination relationship between an INGO and an LNGO is possible and is equally likely as the development of a relationship between INGOs and LNGOs. When all of the INGOs and LNGOs have negotiated their coordination arrangements, the ABM terminates.
The second section of the ODD protocol establishes the model design concepts.
Emergence
The local interactions and coordination decisions that occur among the INGO and LNGO agents over time will impact overall the overall humanitarian logistics system performance during the disaster response phase (as represented in the DES). This performance subsequently affects future NGO coordination decisions. Thus the pattern of coordination strategy updates, and the resultant coordinated relief chain structure, is an emergent property of the ABM.
Adaptation
Each time the ABM is executed, the donor agents update their donation allocation strategies in response to the logistics performance of the NGO agents, and the NGO agents update their coordination strategies based on their satisfaction with their own performance. However, these decisions are only based on performance in the most recent previous relief operation (i.e. the agents’ “memories” are quite short). Thus they do not “learn” incrementally from their experiences over time, so adaptation is not a salient feature of this ABM.
Objectives
Each donor agent’s objective is to allocate its relief supplies to the NGO agents in a way that will maximize the likelihood that demand for aid will be filled using minimal resources (i.e. money and time). The objective of the INGOs and the LNGOs is to ensure that their logistics performance does not reduce over time, and that it does not fall below average with respect to the other NGOs.
Prediction
The stochastic and interdependent elements of the DES model of relief operations make exact prediction of NGO operational efficiencies impossible. Therefore, donor agents are unable to optimize their allocation decisions and must instead rely upon imperfect information (i.e. NGO prestige) to inform their decisions. Likewise, INGO and LNGO agents are unable to predict the outcome of a given coordination strategy. Their model of prediction is simple: if the previous coordination strategy led to agent satisfaction, then it is likely to continue to do so in the future and should be maintained; if it led to dissatisfaction, it should be abandoned.
Sensing
It is assumed that all agents in the ABM have complete and perfect knowledge of the prestige values of all of the INGO and LNGO agents.
Interaction
Donor agents do not interact with one another, and they do not interact with the INGO/LNGO agents in the ABM. The NGO agents interact with one another to establish (or dissolve) coordination groups.
Stochasticity
The ABM does not include any stochastic elements.
Collectives
Donor agents do not form collectives. Coordinated NGO agent collectives may form as a result of the previously described interactions. These collectives may include two, three, or all four of the NGO agents.
Observation
Outputs from the ABM include the allocation strategy of each donor agent and the size and constituent makeup of each coordinated NGO group that forms. These outputs are of interest to the modeler, in terms of the structure of the coordinated humanitarian logistics network that emerges over time, and they are also used as input data to inform the DES portion of the hybrid model.
The third and final section of the ODD protocol specifies the ABM model details.
Input data
Two types of input data are required for the ABM: initialization data and update data. Initialization data is used to characterize the agents at the beginning of the simulation run, providing initial values for the parameters and state variables. Ideally, all of this data would be empirically derived from an actual set of humanitarian relief actors. In the example ABM described here, initialization of the agents is based entirely on theoretical values. Update data is provided by the DES model of the disaster response phase, which includes total shipping costs for each INGO/LNGO, and the amount of demand that was successfully filled by each NGO.
Initialization
The prestige values of each of the four NGO agents are initialized to 0.25 (i.e. they are all presumed to have equal performance potential). The INGO and LNGO agents are all initialized as being in the “satisfied” state, and they are all operating independently at when the model is first executed (i.e. there is no coordination in the first time-step).
Submodels
There are three submodels within the ABM: NGO evaluation of satisfaction, donor evaluation of the NGOs, and NGO coordination:
NGO evaluation of satisfaction: each NGO will evaluate its level of satisfaction with its performance after each disaster occurrence by assessing its “rate” (r i), which is the ratio of the total number of units of demand fulfilled by agent i (f i) in the most recent previous relief operation to its total shipping costs (c i): (Equation 1) Rates are measured in terms of units of fulfilled demand per dollar spent on shipping, and therefore larger rate values are preferable. The number of demand-filling units delivered is different from the total number of units delivered. For example, if the unfilled demand for supplies in an affected region is 1,000 units, and the NGO ships 1,500 units to the region, then the number of units delivered is 1,500, but the number of demand-filling units is only 1,000. It is assumed that all NGO agents have knowledge of the current rate values of all other NGOs in the system. An NGO will be satisfied if two conditions are met: first, its current rate is greater than or equal to its rate in the most recent previous relief operation; and second, its current rate is greater than or equal to the average rate of all NGOs in the system. If either of these conditions is not met, the NGO is unsatisfied and will change its coordination strategy.
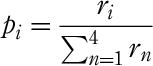
Donor evaluation of NGOs: the prestige value of each individual NGO agent (p i) is calculated by dividing the NGO’s rate (r i) by the sum of the rates of all NGOs in the system, thereby normalizing NGO i’s prestige value relative to the values of the other NGOs: (Equation 2) The prestige values for each NGO fall between 0 and 1, where larger values are desirable. It is assumed that all donors know the prestige values of all of the NGOs, and it is assumed that each donor’s evaluation of an NGO’s prestige is the same. Further, it is assumed that the evaluation of each NGO’s prestige is independent of its coordination status with other NGOs; that is, coordinating with an NGO with a higher/lower prestige does not increase/reduce your own prestige value. Each of these prestige values represents the probability that a shipment of relief suppliers from a donor will be allocated to that NGO. For example, if an INGO’s prestige is valued at 0.75, then 75 percent of shipments from each donor (on average) will be allocated to that INGO. Thus the prestige values are inputs to the DES model.
NGO coordination: NGOs that are satisfied will maintain their current coordination strategy. Therefore, if a satisfied NGO is operating independently (i.e. it is not coordinating with others), it will not seek coordination partners, nor will it accept offers of coordination from other NGOs. If a satisfied NGO is part of a coordinated group, it will remain in that group. By contrast, NGOs that are unsatisfied will actively seek to change their current coordination strategies: a unsatisfied NGO that is part of a coordinated group will leave the group and will work alone in the next relief operation, and a unsatisfied NGO that is currently operating independently will seek other unsatisfied NGOs with which to partner. It is assumed that all unsatisfied NGOs will agree to collaborate; thus collaborative groups could form that contain two, three, or all four NGOs.
4.2. DES model
A conceptual DES model of the disaster response phase of the relief operation was developed using Arena and will be described next. Because the structure of DES models is quite different from ABMs (e.g. emergence, adaptation, and other agent-related attributes are not employed), only the first section of the ODD protocol (the model overview) is appropriate for describing the DES model.
Purpose
The purpose of the DES model is to represent the post-disaster response phase of a relief operation. The donation allocation values established by the donor agents in the pre-disaster ABM are implemented, and the INGO and LNGO agents apply the transportation and information-sharing coordination mechanisms that were arranged in the ABM. The DES enables the impacts of these pre-disaster decisions on overall humanitarian logistics operational success to be assessed, in terms of the total amount of time and the total shipping costs that are required to fulfill all demand for relief supplies throughout the disaster response phase.
Entities and state variables
In the DES, the entities are the relief supplies that must be transported from donors to a staging location and finally to local warehouses in the disaster-affected regions. In a real-life relief chain, the types of supplies will vary (e.g. food, shelter, medicine), but in this example model the supplies are all assumed to be identical. The donor agents are represented as supply sources in the DES model, and the NGO agents are represented indirectly via the model logic that facilitates the movement of supplies from the donors to the local warehouses. Thus in the DES, the agents no longer have agency – they simply follow the rules (i.e. logic statements) that were defined for them in the preparedness stage represented by the ABM. State variables include inventory levels at each of the four NGO’s staging locations, the status of each shipment (i.e. whether it is in transit or arrived at one of the local warehouses), and the amount of unfilled demand at each local warehouse.
Process overview and scheduling
Following the allocation strategy that they formed in the ABM, the four donors will send shipments of relief supplies of random sizes to the INGO and LNGO global staging locations at random points in time throughout the disaster response phase. The size of each shipment is based on the following discrete probability distribution: 50 percent of all shipments contain 100 units, 25 percent of shipments contain 200 units, and the remaining 25 percent of shipments contain 300 units. For each donor, the time between shipments to the NGOs is distributed exponentially, with a mean of five days. The randomness of the donation sizes and inter-arrival times reflects the uncertain supply that is characteristic of humanitarian relief operations.
Upon arrival at the staging locations, the NGOs add these supplies to their inventory. If the NGO is operating independently, it will wait until it has accumulated a predetermined minimum amount of inventory (i.e. 500 units), and then it will ship its entire inventory to one of three local warehouses in each of three different regions in the disaster-affected area. If the NGO is operating as a member of a coordinated group but is not acting as the group leader, it will wait until it has accumulated at least 500 units of supplies, and then it will transship its entire inventory to the group leader. The group leader waits until two conditions are met: first, it has accumulated at least 500 relief supply units of its own; and second, it has received at least one shipment from each of its coordination partners. Once both of these conditions are met, the leader will send a single aggregated shipment to one of the three local warehouses in the disaster-affected area. Each shipment costs $1,000, regardless of size, and it is assumed that each shipment has infinite capacity. This shipping cost is shared equally among coordination group members (e.g. if the group consists of two NGOs, each will pay $500). Transportation time from the NGO staging location to any of the three local warehouses is random and follows a triangular distribution with minimum, mode, and maximum parameter values set to 2, 4, and 10 days, respectively. Unlike many real-life humanitarian logistics scenarios, in this example model it is assumed that every shipment is guaranteed to arrive intact at its intended destination, and that all of the relief materials in a shipment will go toward filling unfilled demand.
An NGO will send its shipment to the warehouse that it believes has the greatest demand. Demand at each warehouse is randomly assigned at the start of each simulation run and is based on a triangular distribution with minimum, mode, and maximum parameter values set to 5,000, 15,000, and 25,000 units, respectively. This demand represents the entire demand for relief supplies over the course of the disaster response phase. INGOs are assumed to have limited knowledge of the current state of demand at the local warehouses; therefore, when operating independently, they are equally likely to send a shipment to any one of the three warehouses. By contrast, LNGOs are assumed to know the status of demand at all three locations, and they will send a shipment to the location that has the largest amount of unfilled demand. If an INGO and an LNGO are members of the same coordinated group, they will always ship to the location with the greatest unfilled demand, based on information shared by the knowledgeable LNGO. The last-mile transportation of supplies from the local warehouse to the aid recipients is exogenous to this model. When all demand at all three local warehouses has been filled, the DES model terminates and the disaster response phase is complete.
4.3. Hybrid ABM-DES model
A hybrid simulation model of the theoretical humanitarian logistics system described above was developed by combining the pre-disaster ABM and the post-disaster response phase DES model sequentially over multiple iterations. In each iteration, the ABM outputs (NGO prestige values and coordinated group structures) served as inputs to the DES, and the DES outputs (NGO shipping costs and demand fulfillment values) became inputs to the ABM. Because this hybrid ABM-DES model was developed using two different software platforms (i.e. NetLogo for the ABM and Arena for the DES), the input/output data were transferred from one model to the other via read-write file functions.
5. Experimental results and discussion
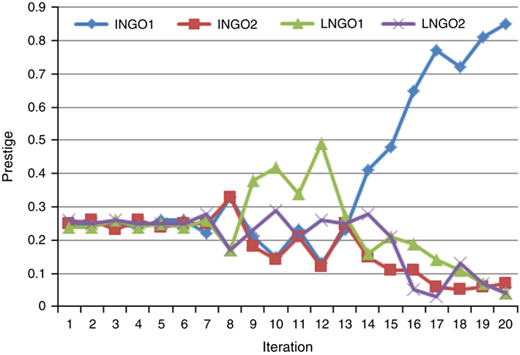
The example model described in the previous section was used to assess the behavior of a theoretical humanitarian logistics system over time. The model was run for 20 iterations, corresponding to 20 sequential pre-disaster preparedness and post-disaster response stages. Prestige and coordination group structure data were captured for each of the four NGO agents in each iteration. Figure 1 shows the prestige value of each agent, which remained fairly stable and uniformly distributed for the first seven iterations. However, when the first coordination partnership emerged between INGO1 and INGO2 in iteration 8, the variability of prestige values between agents began to increase. In iteration 14, the prestige of INGO1 began to climb steadily and dominated the other three agents for the remaining simulations. This rapid increase in prestige was apparently fueled by INGO1’s coordinated partnerships with LNGO2 in iteration 14 and LNGO1 in iterations 15, 16, and 17. Most likely, INGO1 benefited from the information-sharing mechanism that enabled it to learn which local warehouses had the greatest remaining unfilled demand from the knowledgeable LNGOs, and therefore make informed decisions about where to send its shipments to best meet the needs of aid recipients. This also demonstrates the “snowball effect” of an organization that is able to attract attention and donations, which enables it to reach more aid recipients, thereby further increasing its prestige and attracting more support.
It is interesting to note that LNGO1 decided to remain in a group with INGO1 in iterations 15, 16, and 17, even though its own prestige values dropped (pLNGO1=0.21, 0.19, and 0.14 in iterations 15, 16, and 17, respectively). This occurred because LNGO1’s rate actually increased over these iterations (rLNGO1=0.51, 1.94, and 2.04 in iterations 15, 16, and 17, respectively), and therefore it remained satisfied and saw no reason to leave the group. This demonstrates a tradeoff for LNGO1: by coordinating with INGO1, LNGO1’s efficiency improved as a result of significantly reduced shipping costs, but at the same time LNGO1’s prestige reduced as INGO1 made huge gains, since prestige is competitive (i.e. an NGO’s prestige is measured relative to that of the other NGOs). Thus, by remaining in a group with INGO1, LNGO1 effectively decided that it was worth giving up some of its autonomy in order to improve its efficiency.
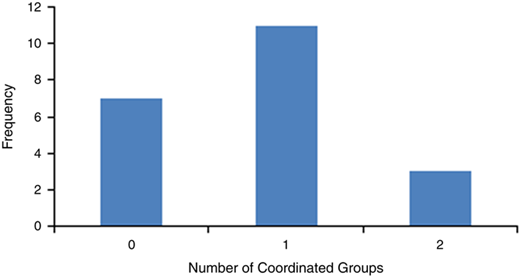
A coordinated group is formed when two, three, or all four NGO agents decide to work together. Thus, in any given iteration, zero, one, or two coordinated NGO groups could form. Figure 2 is a histogram of the number of coordinated groups that formed in each iteration of the simulation. As Figure 2 indicates, at least one group formed in 13 of the 20 iterations. Over all 20 iterations, the mean number of coordinated groups that formed per iteration was 0.80 groups (with a standard deviation of 0.68), and the mean group size out of all groups that formed was 2.13 agents/group (with a standard deviation of 0.33). Nearly every group that formed was a two-agent partnership; a three-agent group formed briefly in the 15th iteration but dissolved in the 17th iteration. All of the coordinated groups were fairly short-lived; the average lifespan of a coordinated group was 2.00 consecutive iterations (with a standard deviation of 0.71), and the longest coordination was three consecutive iterations.
In addition to these agent-level metrics, three system-level output metrics were captured to assess the efficiency of the system:
system shipping cost per unit of demand ($/unit);
time required to fill system demand (days/unit); and
ratio of the total number of units shipped to the total number of units demanded.
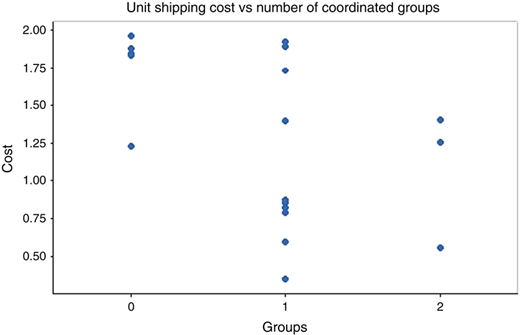
Figure 3 shows the relationship between the shipping cost per unit of demand and the number coordinated groups in the system in a given iteration. A trend of decreased shipping cost with increased number of coordinated groups is apparent in the plot. The variability in cost from one iteration to the next is quite large, but the resulting general trend is intuitive – having more groups in the system should result in more aggregated shipments, which will increase overall system efficiency.
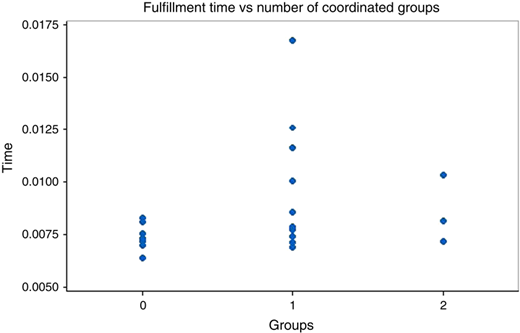
Figure 4 shows the relationship between per-unit demand fulfillment time and the number of coordinated groups. On average, coordination does not seem to increase response time much. However, the plot shows that when there is at least one coordinated group in the system, the per-unit demand fulfillment time is much more variable than a system without groups, and it can sometimes be quite high, as a result of increased waiting time to aggregate coordinated shipments.
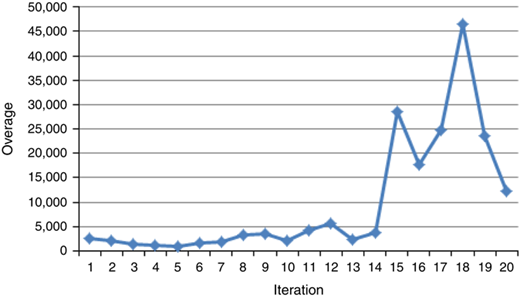
Figure 5 shows the number of excess units that were shipped to warehouses for which there was no longer demand. This value was relatively low and stable until iteration 15, after which it increased significantly. Interestingly, this increase occurred at approximately the same time that INGO1 began to dominate the system, in terms of prestige and number of donations received. As its prestige steadily increased, it maintained coordinated partnerships with other NGOs, whose relative prestige had dropped significantly. It is likely that INGO1 had to wait for increasingly long periods of time to receive transshipments from its partners, and in the meantime its own inventory rapidly increased. As a result, its aggregated shipments became very large. Even though INGO1 was able to benefit from the information it received from its LNGO partners on the regional demand levels, it overwhelmed the demand of the receiving warehouses with the enormous aggregated shipments it sent.
The results presented in this section highlight the usefulness of the hybrid ABM-DES simulation modeling methodology for capturing complex system behaviors that emerge over time. In particular, the emergence of INGO1 as dominant actor after iteration 14 and the effect that this had on oversupply to the warehouses could not have been anticipated by simply observing the system behavior in earlier iterations. Feedback loops within the system caused it to behave in unexpected ways, with impacts on system performance that were not necessarily intuitive. Given that the agents in this example model were governed by relatively simple rules and did not have much capacity to adapt to their environment intelligently over time, these results are particularly interesting.
6. Conclusion and future work
This paper presented a conceptual hybrid ABM-DES model of a theoretical humanitarian logistics operation in which three different types of relief chain participants (donors, international NGOs, and local NGOs) were represented as different classes of agents. As in real-life relief operations, the agents had diverse roles, objectives, and levels of knowledge about the system in which they were embedded. The ABM component of the hybrid model enabled the representation of these heterogeneous agents and the interactions among them that led to horizontal and vertical coordination in the pre-disaster phase, via shared transportation and information sharing. The DES component of the model captured the flow of relief supplies through the post-disaster logistics system, based on the pre-disaster coordination arrangements defined in the ABM. The hybrid model was used to examine the efficiency of the system, with respect to shipping costs and response times, and the output suggested that even in a simple model, complex behavior can emerge.
The example hybrid simulation model presented here can provide a basis for many interesting future experiments and extensions. Many of the model parameter values could be varied experimentally to determine the sensitivity of the model; for example, the minimum inventory aggregation level at the NGO staging locations could be changed, the probability distributions for demand and donor supply could be made more variable, the shipping costs could be increased, and different initial values of NGO prestige could be tested. The agents can also be given more complex traits and behaviors to make the system more realistic. For example, additional donor agents of varying size and influence could be introduced into the model, and they could be assigned heterogeneous methods of assessing NGO prestige, based on their individual values and preferences. NGO agents can also be given more intelligence with respect to their coordination decisions, and their complex decisions about whether or not they follow through on their commitments to the partners during the post-disaster response phase could also be captured. Different coordination mechanisms, such as collaborative procurement, could be introduced. New classes of agents (e.g. aid recipients, members of the local military) could be developed, and the DES could be extended to include last-mile delivery of supplies. The availability of empirical data to inform a hybrid humanitarian logistics model would support model validation and would enable the creation of a useful tool for understanding (and possibly predicting) the behaviors of a real-life disaster relief system.
A major challenge associated with the implementation of the hybrid ABM-DES modeling methodology presented in this paper involved the integration of the two different simulation modeling platforms (NetLogo and Arena). These platforms were chosen because of the author’s familiarity with them. For the development of larger-scale hybrid models of relief chain operations, if two separate dedicated-purpose ABM and DES platforms are used, an interface between them must be developed through which data can be efficiently exchanged. Currently, the author is only aware of one simulation modeling platform that has both ABM and DES capabilities (AnyLogic), and this is an avenue for further investigation.
Hybrid ABM-DES modeling offers the potential for achieving a greater understanding of the impact of behaviors like coordination on resultant emergent system-level outcomes in humanitarian logistics systems. The human elements of the system can be captured and incorporated into the model in way that greatly increases its realism and usefulness, thereby helping modelers and practitioners determine which individual behaviors should be encouraged to improve overall system performance, as well as providing insight into how such behaviors might be encouraged. In humanitarian logistics systems, where human lives and welfare are at stake, this is a particularly worthwhile endeavor.