
Customer perceptions toward hybrid human–robot teams remain largely unexplored. We focus on the impact of frontline robots’ (FLRs) automated social presence (ASP) on customers’ perceived teamwork quality, and ultimately frontline employees’ (FLEs) competence and warmth. We explore the role of interrogation as a relevant contingency. We complement the customer view with insights into the FLEs’ viewpoint.
We manipulate FLR’s ASP cues (speech and identity) in a hybrid team in four business-to-consumer (B2C) video-based experiments and collect data from online participants. We combine these with one business-to-business (B2B) field survey which collected data from FLEs working in hybrid teams.
When FLR’s ASP increases, customers more positively evaluate teamwork quality, ultimately affecting FLEs’ competence and warmth. FLEs who correct (interrogate) robotic mistakes strengthen the positive effect of FLRs’ ASP on teamwork quality. When FLRs correct FLEs, ASP’s effect on teamwork quality is also strengthened, while FLEs are not “punished” for erring. In contrast, FLEs themselves do perceive corrections as detrimental to teamwork quality. We term this the hybrid team evaluation paradox.
We recommend that firms deploy hybrid teams equipped with high-ASP FLRs (name and speech suffice). FLEs should be trained, and FLRs programmed, to appropriately use interrogation. Managers should pay attention to the paradox, given the conflicting perceptions toward interrogative behaviors.
We advance the hybrid teams literature by drawing on ASP, social cognition and collective mindfulness theories and behaviors that ameliorate customer perceptions. Our results support using FLRs to enhance FLEs’ capabilities.
Introduction
With the advent of frontline robots (FLRs) as autonomous interfaces that can interact with and deliver service to customers, more and more firms now install hybrid teams in which frontline employees (FLEs) and robots harmoniously cooperate to satisfy customer needs (De Keyser et al., 2022). A hybrid team consists of at least one FLE and one FLR collaborating in the service provision towards a shared goal. For instance, in Hong Kong hospitals, an ultra-humanlike FLR called Grace assists nurses in patient temperature measurement and entertaining conversations (The Economic Times, 2021). And in South Korea, the restaurant chain Robert Chicken has FLEs and sophisticated robo-assistants jointly prepare and serve the food to guests (Fortune, 2024).
A key, yet unanswered, question is how customers evaluate employees in these teams. FLEs represent the “face of the organization” and customer perceptions of their performance are strongly related to outcomes like customer satisfaction and loyalty intentions (Schepers and Van der Borgh, 2020). Customer responses to FLEs in hybrid teams can either be favorable or unfavorable. On the one hand, customers may feel that hybrid teams provide more flawless service than a sole employee would do. Indeed, working as a team also allows FLEs and FLRs to actively check and correct each other’s interpretation of a service situation, a process called corrective interrogation (cf. Sowa et al., 2021). Customers may evaluate these flawlessly operating employees more positively. On the other hand, customers may be skeptical that robots are necessary to make FLEs effective and evaluate the FLE more critically and thus less positively.
In this research, we posit that automated social presence (ASP; i.e. the degree to which FLRs makes humans “feel the presence of another social entity” (van Doorn et al., 2017, p. 43), plays a major role in the way customers perceive FLEs and FLRs to work together. When the FLR’s ASP is salient, there is a more natural interaction and a shared awareness between hybrid team members which gives customers a more positive view on the effectiveness and efficiency with which employee and robot work together, i.e. their teamwork quality. According to collective mindfulness theory (Weick and Roberts, 1993), a team’s shared awareness is especially strong when there is both social fabric (i.e. ASP) and interaction (i.e. corrective interrogation) between the team members (Lim and Klein, 2006). Corrective interrogation may thus be a contingency in the ASP-teamwork quality relationship in the eyes of the customer, whose well-being depends on the performance of the hybrid team. However, in line with the general notion in teamwork literature that perspectives of team members and observers do not always align (e.g. Andersson et al., 2017), we account for the fact that hybrid team employees may have a different view. Continuously correcting a frontline robot may be strenuous for employees, thereby undermining the power of FLR ASP in hybrid teams.
More specifically, our research objective is to understand the impact of FLRs’ ASP on both customers’ and FLEs’ evaluations in hybrid teams and the role of interactions between employees and robots herein. Such an understanding helps firms to better structure and manage hybrid teams and to optimize their frontline service provision. To provide a comprehensive and holistic perspective on this issue, we first consider the customer view on smoothly operating hybrid teams, as well as on hybrid teams in which little mistakes occur and members correct (interrogate) each other. We then consider the employee perspective on hybrid teams to investigate the tension with the customer perspective. In doing so, we consider both business-to-consumer (B2C) and business-to-business (B2B) settings, and leverage video-based experimentation as well as field data. Jointly, these efforts add valuable new insights to prior empirical research on hybrid teams. We elaborate on three significant contributions in more detail below.
First, we uncover how ASP and corrective interrogation in hybrid teams influence the evaluation of these teams and their employee members. This provides the next big step in an emerging stream of studies on hybrid teams, which is still embryonic but growing. For instance, De Gauquier et al. (2023) studied FLE performance in hybrid teams in retail stores but did not uncover the mechanism to explain variation in performance. Odekerken-Schröder et al. (2021) focused on ASP a potent explanatory means but did not account for interactions within the team. Other ASP studies show that robots with more social presence are better accepted by customers (e.g. Yoganathan et al., 2021), but do not examine how this affects employee evaluations. We posit and empirically substantiate that ASP results in customers perceiving better teamwork quality, which spills over to their evaluation of the FLE’s competence (i.e. intellect, quality of work) and warmth (i.e. social skills, friendliness; Fiske et al., 2007). In other words, highly socially present robots in hybrid teams improve rather than deteriorate the customers’ evaluations of FLEs. From a practical point of view, we find that such ASP can be simply yet effectively increased by providing the robot with an identity (i.e. giving the FLR a name) and imbuing the robot with speech.
Second, we explore the role of correcting mistakes in hybrid teams. Robots recovering their own failures have been investigated (Choi et al., 2021), but not much is known about humans correcting robots and vice versa in a hybrid team setting. We identify FLE’s and FLR’s corrective interrogation as a crucial contingency of customers’ perceived teamwork quality. Thanks to testing both confirmatory (i.e. double-checking the correctness of an already well-delivered service) and corrective interrogation, we are capable of discerning that mere intra-team communication is not enough to uplift teamwork quality. Hence, it is the corrective communication that, by actively catching and solving errors, can make a positive difference. This more elaborate perspective on the role and types of interrogation significantly extends the literature.
Finally, we account for FLEs’ perspective as a meaningful addition to the current state-of-the-art. While most previous hybrid teams studies have studied either the FLE or customer viewpoint (e.g. Jeon, 2022; Ameen et al., 2024), we examine both contemporaneously and uncover a captivating tension that we call hybrid team evaluation paradox. This paradox holds that while customers have more positive evaluations of teams and employee members when high-ASP robots and employees interrogate each other, the employees involved consider the value of ASP to be much lower when they need to interrogate the robots involved.
Using four video-based experimental studies capturing the customer’s view and one field survey tapping the employee’s view on hybrid teams (total N = 1,239), we find evidence that FLRs with a high ASP improve customers’ perceptions of teamwork quality and, thereby, FLEs’ competence and warmth. The process is one of moderated mediation with both the FLEs’ and FLRs’ corrective interrogation as a central contingency. However, in the FLEs’ view corrective interrogations diminish rather than enhance ASP’s effect on teamwork quality.
Theoretical background
Hybrid teams of employees and robots
Hybrid teams in the service frontline consist of humans and service robots, which are “system-based autonomous and adaptable interfaces that interact, communicate, and deliver service to an organization’s customers” (Wirtz et al., 2018, p. 909). These teams may be successful because robots excel in different tasks (e.g. complex calculations) than employees (e.g. building customer relationships). FLEs and FLRs thus work together, and complement each other, towards a common goal of optimal service provision (Le et al., 2022). Table 1 provides an overview of empirical works on hybrid teams and positions our current work.
Literature review of selected empirical research on hybrid employee–robot teams
| Author(s) | Perspective | Research setting | Data collection | ASP | Interrogation | Findings | |||
|---|---|---|---|---|---|---|---|---|---|
| Customer | Employee | B2C | B2B | Online/lab | Field | ||||
| Ameen et al. (2024) | ✔ | ✔ | ✔ | ✔ | The prediction stage benefits from collaborations involving processing-speed and visual-spatial FLRs. The detection stage requires logic-mathematical, social and processing-speed FLRs. The recovery stage requires logic-mathematical, social, verbal-linguistic and processing-speed FLRs. The post-recovery stage calls for logic-mathematical, social, verbal-linguistic and processing-speed FLRs | ||||
| Blaurock et al. (2024) | ✔ | ✔ | Strong hybrid teams relate to perceived service improvement, perceived outcome responsibility, (threat to) meaning of work and adherence to the system. Particularly, transparency, process control and outcome control are important design features, while engagement seems less relevant. Previous AI experience of employees is an important contingency factor | ||||||
| Choi et al. (2021) | ✔ | ✔ | ✔ | Humanoid FLRs are more strongly associated with warmth. Customers are more dissatisfied when there is a lack of warmth. These FLRs can recover the service with sincere apologies and explanations. Remarkably, FLE intervention can be used as a mitigator | |||||
| De Gauquier et al. (2023) | ✔ | ✔ | ✔ | ✔ | FLRs are superior (vs FLEs) to generate attention and stop passers-by, but lure into the store is diminished. FLEs yield fewer interactions but could convert the highest number of passersby. The hybrid team derived the highest number of passers-by to look at the store, but did not convert more than the FLR on its own | ||||
| Huang et al. (2024) | ✔ | ✔ | ✔ | Anthropomorphized (vs non-anthropomorphized) FLRs paired with creative FLEs improve service evaluations by customers. Customers transfer the FLE’s creativity to the FLR. This transference effect is decreased by low temporal stability of the team, challenged customers’ lay beliefs about group entitativity, or utilitarian customer motivations | |||||
| Jeon (2022) | ✔ | ✔ | ✔ | Customers perceive FLR managers more positively in terms of likeability, knowledgeability and trustworthiness than the FLEs. This is accentuated when customers are transferred to FLR managers from FLRs. Further, the FLR job titles have positive customer satisfaction, brand attitude and the customers’ intentions to purchase implications | |||||
| Le et al. (2024) | ✔ | ✔ | ✔ | Making hybrid team’s collaboration visible can reinforce perceptions of team cohesiveness and service process fluency, driving satisfaction. Hybrid team’s collaboration appeals to customers by means of process transparency | |||||
| Longoni et al. (2019) | ✔ | ✔ | ✔ | Consumers derive negative utility if a healthcare provider is automated rather than human. Uniqueness neglect drives consumer resistance to medical AI. Uniqueness neglect mediates resistance to medical AI and is eliminated when AI provides personalized care, to consumers other than the self or that only supports, rather than replaces, a decision made by a human healthcare provider | |||||
| Lv et al. (2024) | ✔ | ✔ | ✔ | ✔ | ✔ | FLEs who collaborate with FLRs yield a lower warmth, as compared to when they collaborate with FLEs. This is caused by the reduced social interaction in hybrid teams. Nonetheless, maintaining high-quality service interactions with customers can mitigate such phenomenon | |||
| Moliner-Tena et al. (2024) | ✔ | ✔ | ✔ | ✔ | FLEs are held responsible for the firms’ outcomes from the customer standpoint. FLRs are regarded as hybrid team members with a complementary character. However, FLEs have animosity toward FLRs and do not consider them as partners | ||||
| Odekerken-Schröder et al. (2021) | ✔ | ✔ | ✔ | ✔ | ✔ | The “customer-FLE-technology” interplay results in customer repatronage. The relationship between anthropomorphism and social presence affects perceived value. FLRs’ utilitarian value is a driver of customer repatronage | |||
| Paliga (2022) | ✔ | ✔ | There is a mediating role of work engagement in the relationships of human contribution-oriented fluency and team-oriented fluency with job performance. Hybrid team’s fluency relates to employee job performance because of the positive affective–cognitive state experienced by the human when cooperating with a robot in a coordinated and well-synchronized manner | ||||||
| Paluch et al. (2021) | ✔ | ✔ | ✔ | The FLE–FLR interaction is a multistage appraisal process based on adoption-related perceptions. Relevant FLE, FLR and job attributes suppose the foundation to understand the appraisal of FLRs. FLEs can be clustered in four employee personas (supporter, embracer, resister, and saboteur) that provide a differentiated perspective regarding the hybrid team | |||||
| Shanks et al. (2024) | ✔ | ✔ | ✔ | ✔ | ✔ | Customers respond less favorably to FLR-led (vs FLE-led) teams. Customers ascribe less power to FLR (vs FLE) team leaders, which increases consumer anxiety and drives downstream responses through serial mediation | |||
| Simon et al. (2020) | ✔ | ✔ | ✔ | A trust-based conceptual framework necessary for successful future human–robot interaction in frontline teams is crafted the wider service sector | |||||
| Sowa et al. (2021) | ✔ | ✔ | Different types of AI are discussed. Researching modes of collaboration between FLEs and FLRs are explored. Increased productivity is achieved due to enhanced hybrid team collaboration. While full automation is contemplated, augmentation/collaboration is posited as the optimal general approach | ||||||
| Wang et al. (2024) | ✔ | ✔ | ✔ | Hospitality employees’ collaboration intentions are enhanced when working with non-humanoid (vs humanoid) FLRs. High task interdependence and role clarification help mitigate FLE’s adversity toward human-like robots | |||||
| You and Robert (2023) | ✔ | ✔ | Robot identification (RID) and team identification (TID) are associated with increases and decreases in the likelihood of a subgroup formation, respectively. RID and TID moderated the impacts of subgroups on teamwork quality and subsequent performance in human–robot teams | ||||||
| This study | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | FLR’s ASP affects hybrid team evaluations which then relates to FLE’s competence and warmth. Importantly, FLEs and FLRs correcting one another strengthens the relationship between FLR’s ASP and hybrid team evaluations |
Source(s): Table by authors’
The overview illustrates that previous research has either leveraged an employee perspective or a customer view towards hybrid teams, but rarely highlighted the contrasts between these two (Lv et al., 2024; Moliner-Tena et al., 2024). Most research considering the FLE standpoint has focused on the adoption process of the individuals involved. For instance, Wang et al. (2024) focus on hospitality FLEs’ intention to collaborate with either humanoid or non-humanoid FLRs. Other works highlight drivers of hybrid team acceptance (e.g. trust and control; Simon et al. (2020), organizational consequences (e.g. subgroup formation; You and Robert, 2023) and employee-level results of adoption (e.g. decreased responsibility; Blaurock et al., 2024). From the customer viewpoint, several studies focus on customer responses to hybrid teams in general. For instance, De Gauquier et al. (2023) demonstrate FLRs’ superiority (vs FLEs) in generating attention and stop on passers-by. In a medical setting, Longoni et al. (2019) study patient responses to hybrid teams’ diagnoses. Choi et al. (2021) show how customers associate humanoid FLRs more strongly with warmth as compared to non-humanoid ones.
Apart from the fact that studies mostly considered the customer or employee perspective (i.e. see first set of columns in Table 1), other observations can be made as well (i.e. see other columns in this Table). For instance, the large majority of studies have focused on B2C settings (e.g. De Gauquier et al., 2023; Sowa and Przegalinska, 2020). Recently though, Ameen et al. (2024) identify the specific types of skills required by AI to enhance human–AI collaboration performance in different stages of a B2B service recovery process. They focus on manager perceptions, rather than employee perceptions in this process though, such that an insider perspective of the actors in this recovery process is missing. Because outsider perceptions may differ from insider experiences in hybrid teams (cf., Andersson et al., 2017), not considering the view of the employee is an important omission.
From a methodological perspective, while some studies rely on online/lab settings (e.g. Huang et al., 2024; Jeon, 2022; You and Robert, 2023), and others on field data (e.g. Paliga, 2022; Paluch et al., 2021; Sowa and Przegalinska, 2020), there is a call for employing mixed methods to get a more holistic view on the hybrid teams phenomenon (Shanks et al., 2024; You and Robert, 2023). This is especially needed to capture both the instant perceptions that hybrid team observers (i.e. customers) may have about the functioning of these FLE–FLR combinations, as well as the longer-term evaluations of the employees involved in these teams.
Furthermore, some studies have considered how design elements of the robot or the team as a whole influence customer perceptions. For instance, Le et al. (2024) uncovered that making hybrid team’s collaboration visible reinforces customers’ perceptions of team cohesiveness and service process fluency. Huang et al. (2024) and Odekerken-Schröder et al. (2021) focus on the role of anthropomorphism in this process. While the latter study also includes social presence in their model, their measurement relies on natural variation in customer responses toward the ASP radiated by a single robot. As a result, what is still missing in prior studies on hybrid teams is how firms can increase ASP perceptions for both employees and customers in a simple manner, such as through imbuing the robot with speech and giving it an identity (i.e. a name).
Finally, in line with collective mindfulness theory (Weick and Roberts, 1993), we posit that both social fabric (i.e. ASP) and interaction (i.e. corrective interrogation) between the team members are important for optimal team functioning (Lim and Klein, 2006). However, the interaction between FLE and FLR has garnered little attention so far. In fact, we only find the recent work of Shanks et al. (2024), in which employee–robot communication is considered from a robot-led vs human-led perspective. In their work, communication tends to be of a confirmatory nature though, not a corrective one. Thus, the effects of employee–robot corrective interrogation remain untapped.
Overall, these prior studies leave some essential design elements (i.e. ASP and corrective interrogation) in hybrid teams and the resultant perceptions both employees and customers insufficiently addressed. Moving forward, we note that past research has considered both embodied robots performing tangible actions (e.g. humanoid hotel concierge) and non-embodied robots performing intangible service actions (e.g. virtual assistant at ATM counter). Given the potential and pragmatism of non-embodied robots to team up with employees in a large range of services (e.g. financial advice, medical consultation, electronics installation (solar panels, WiFi), construction designs, garden design, etc.), we focus our study on hybrid teams of employees and non-embodied robots.
Social cognition and collective mindfulness theory
From the customer perspective, a critical question in our work is how customers evaluate employees when they work with robots in a hybrid team. To study this process, we build on social cognition theory, which features prominently in research on robots in the frontline (De Keyser et al., 2022) and suggests that customers characterize FLEs and FLRs in terms of their competence and warmth (Leiño Calleja et al., 2023). Perceived competence refers to the FLE’s apparent ability to undertake a desirable service action, including intelligence, skill, creativity and efficacy (cf. Fiske et al., 2007, p. 77). Perceived warmth symbolizes the FLE’s observed intent in performing service actions, including friendliness, helpfulness, sincerity, trustworthiness and morality (cf. Fiske et al., 2007, p. 77). In traditional service encounters, customers initially assess FLEs’ competence and warmth based on cues such as the FLE’s appearance, facial expressions and body language. However, under the hybrid team umbrella, customers socially cognize FLEs as per the most proximal cue: teamwork quality. When customers experience high intra-team coordination, collaboration and care between FLEs and FLRs, the perceived teamwork quality improves. This synergetic relationship of the involved team members will ultimately make customers assume that the individual members of the team must be skilled and caring, too (cf. Meindl et al., 1985; Rosenzweig, 2007).
The concept of teamwork quality is embedded in collective mindfulness theory (Weick and Roberts, 1993), which posits that a collective awareness of team goals, shared responsibilities and information exchange can enhance overall team performance. Because humans generally like to control robots, they may be inclined to interrogate them for specific information to check whether the robot’s interpretation of the service situation is correct (Paluch et al., 2021). Humans’ interrogative skills (e.g. questioning the accuracy of certain analyses, inquiring about missing parameters) can make a critical difference in high-risk service deliveries, such as medical diagnosis, especially when these result in invaluable corrections (Lebovitz et al. (2022). Interestingly, with robotic agency, the FLR may also interrogate and correct the FLE should the robot estimate that the employee has made a mistake. Such corrective interrogations from either hybrid team member signal to the customer that the team operates well and serves the customer’s best interests. In addition, such communication between hybrid team members can comfort the customer that they are less prone to suffering a service failure, aligning with a proactive approach to service recovery (Challagalla et al., 2009; Jong and De Ruyter, 2004).
Encompassing overview of studies
Figure 1 summarizes our theoretical discussion in a conceptual model underlying our research efforts.
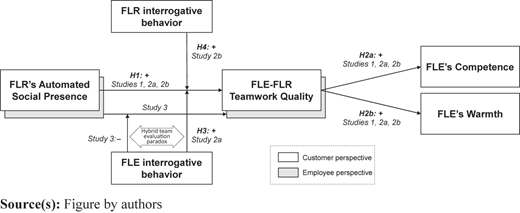
The conceptual model with the tested hypotheses, used studies and derived results
The conceptual model with the tested hypotheses, used studies and derived results
Before we develop our hypotheses below, we provide an overview of our empirical setup. We conduct one pre-study and four main studies. To start, a pre-study demonstrates how non-embodied FLRs are capable of eliciting ASP in customers’ minds. This initial step is crucial since our video-based experimental studies focus on non-embodied FLRs’ ASP.
The first three of our four main studies are online video-based experimental studies wherein we consider the customer standpoint in a B2C service environment. Study one aims to uncover how an FLR’s ASP affects customer perceptions of teamwork quality, the core of our paper. We also demonstrate teamwork quality’s mediating role between FLR’s ASP and FLE’s competence and warmth. Study 2a positions FLE’s corrective interrogation behavior as a key moderator capable of altering the effect of FLR’s ASP on teamwork quality. We then conduct Study 2b in which we put the FLR in the interrogator role, while the FLE appears as the interrogated team member. Additionally, we consider the direct effects which interrogative FLRs may have on erring FLEs in terms of employees’ perceived competence and warmth.
To close, our final study (i.e. Study 3) is a field survey which taps the FLE’s viewpoint in an actual B2B service environment. We examine how FLEs perceive teamwork quality when collaborating with FLRs in the service provision. This last study unveils an underlying tension between the way FLEs and customers evaluate teamwork quality under the hybrid team paradigm. In this light, our integrative setup of studies obtains a holistic perspective on hybrid teams.
Hypotheses development
Summarizing our previous discussion, we explore the impact of FLR’s ASP through teamwork quality on customer perceptions of FLE’s competence and warmth, including the moderation by interrogation. We continue by developing our hypotheses.
Teamwork quality as a mediating mechanism
Different levels of robots’ ASP affect customer perceptions of a hybrid team. If the FLR’s ASP is high, customers will feel in the company of another social entity’s presence (i.e. in addition to the FLEs’ presence; van Doorn et al., 2017) which, if properly in sync with the FLE, will elicit favorable team perceptions. Compared to a customary employee‒customer encounter, a third social entity or agent suddenly becomes part of the encounter and interaction. This robotic third is not a mere bystander or random third component in the service equation, but rather an eye-level partner of the FLE in the hybrid team. The high ASP of the FLR is indeed a distinctive team feature and customers are likely to perceive it as such (e.g. the employee can verbally exchange with the FLR simply using natural language, the employee refers to the FLR by an identifiable name …). These employee actions paired with the high ASP ultimately make customers regard the FLE–FLR combination as a team.
The literature provides several arguments for a potential mediation of the effects of FLR ASP on customer perceptions of the FLE through teamwork quality. A higher ASP is associated with a more natural collaboration between humans and robots (Weinel et al., 2011). You and Robert (2023) argue that the bonding between FLE and FLR determines how much a team fulfills its overall objectives. A higher level of coordination and symbiosis between the hybrid team members will make customers more confident that the FLE‒FLR combination works together effectively, which should benefit the quality of the teamwork (i.e. the service output).
The perception of teamwork quality may spill over to the customer’s judgment of the FLE’s competence and warmth. This means that if teamwork quality increases, FLEs should be judged more positively. Support comes from preceding literature documenting halo effects when global impressions influence how other traits of an entity, process or system are being judged (Nufer and Alesi, 2018). For instance, Meindl et al. (1985) found that a company leader was either described with positive or negative characteristics depending on the company’s performance. In the frontline, Ahearne et al. (1999) documented that the physical attractiveness of a salesperson relates positively to their ability, likeability, expertise and trustworthiness. Consistent with this, we posit that the impression of high teamwork quality will favorably bias the evaluation of the FLE (as a team member).
In sum, we draw up two hypotheses that jointly compile a mediation effect:
When FLR’s ASP increases, customers perceive a higher teamwork quality.
A hybrid team’s perceived teamwork quality relates positively to (a) FLE’s competence and (b) FLE’s warmth.
The moderating role of corrective interrogation
As argued, how team members communicate and collaborate to achieve their team goal is a central contextual factor in hybrid teams. Collective mindfulness theory (Weick and Roberts, 1993) posits that, among team members, a shared awareness of the service reality at hand can be achieved through team communication, including feedback and cross-checking (Endsley and Wright, 2008). Along these lines, we conceptualize FLEs’ and FLRs’ corrective interrogative behavior, which entails asking questions or seeking information through inquiries (Senay et al., 2010) to actively check and correct the interpretation of a service situation (cf. Sowa et al., 2021). Since customers are especially sensitive to errors, losses or problems in service delivery, team actions to prevent (Challagalla et al., 2009) such undue harm are likely to be highly salient (de Matos et al., 2007).
A customer observing interrogation of the FLR by the FLE will generally observe intensified communication and coordination among the team members, strengthening the impact of the customers’ evaluation of the FLR’s ASP and teamwork quality. The FLE interrogating the FLR signals to the customer that the team works well together; the team controls the situation and oversees the service task and outcome. We anticipate that an FLE initiating such an interrogation fits better a high-than a low-ASP FLR. An FLE, who checks on a high-ASP FLR, engages in social information exchange for the team, elevating the team’s collective mindfulness. It comes across as one member correcting another team member, which will be perceived as a cue of teamwork quality because there are additional inter-actor quality checks. In contrast, if an FLE interrogates a low-ASP robot, the exchange signals that the employee has control over the technology during job execution. Since the interrogation is less or not directed toward an entity that is clearly socially present, the effect from the intervention is less likely to be considered a signal of teamwork quality. This is why the FLR’s ASP‒teamwork quality relationship will be strengthened in the former but not under the latter condition. Formally:
When FLEs engage in corrective interrogation with FLRs, the positive effect of FLR’s ASP on customer perceptions of teamwork quality is strengthened compared to a situation where FLEs do not engage in interrogative behavior.
We use a similar line of reasoning to argue for the impact of customers experiencing a situation in which the FLR interrogates the FLE about task performance. Although a FLR applying corrective interrogation on a human colleague can be perceived as offensive or strange, in essence it concerns communication to verify team progress and prevent mistakes, i.e. ensuring team goals are met (Kozlowski and Bell, 2003). In terms of service recovery, as long as the error or mistake is detected and corrected, customers’ perceptions of teamwork quality will be positively influenced (de Matos et al., 2007).
In the previous hypothesis, we anticipated that high-ASP robots are perceived as a better fit with corrective interrogation actions than low-ASP ones. Due to the high-ASP FLR’s communication fluency, such interrogation can be considered natural team behavior. However, low-ASP FLR interrogating a human colleague will feel less natural and even awkward. It is likely interpreted as a pre-programmed check by the service provider; it will appear artificial (cf. Belanche et al., 2020). Under these conditions, the corrective interrogation detracts from the robot’s role as a team member. Therefore, we hypothesize:
When FLRs engage in corrective interrogation with FLEs, the positive effect of FLR’s ASP on customer perceptions of teamwork quality is strengthened compared to a situation where FLRs do not engage in interrogative behavior.
Prestudy: automated social presence in non-embodied robots
Identification of ASP antecedents
In the interest of feasibility and realism, we set out to study robots that are not embodied but act as smart tablets or virtual assistants to the FLE. The increased prevalence of virtual agents, chatbots and voice assistants in various service settings (Konya-Baumbach et al., 2023) has contributed to people accepting these unembodied frontline robots. Examples in consumer settings are Amazon’s ALexa and Apple’s Siri. Although previous works focus on FLRs’ embodiment to yield ASP (e.g. De Gauquier et al., 2023; Odekerken-Schröder et al., 2021; Yoganathan et al., 2021), we posit that unembodied FLRs with their own identity (Gnewuch et al., 2022) and conversational capability (Heerink et al., 2010) can effectively exert ASP. In any case, we further discuss our focus on unembodied robots in the discussion section.
To test our assumption that unembodied FLRs can have high-ASP levels, we first conduct a pre-study to examine the FLR characteristics that make customers perceive these robots as automated socially present. Often lacking physical features that can contribute to social presence, we deem the presence of linguistic and nomenclatural cues for this type of frontline robot to be critical.
Method
We recruited 200 European participants via Prolific to engage in our video-based prestudy experiment (mean age = 37.91, 99 females) and used a two (name vs no name) by two (speech vs no speech) between-subject design. We selected a neutral name (Casey) rather than one unique to man or woman to avoid gender biases. Everyone passed the attention check that asked participants to recall elements of the scenario correctly.
We first instructed participants to watch a video scenario and imagine being part of it. In the video, participants were told that they had just moved to a new home and ordered an Internet subscription from a premium service provider. The provider had offered to take care of the entire installation process. A WiFi installation provides an ideal scenery because technicians are often equipped with support technologies (e.g. PCs, tablets, frequency meters) to help evaluate the installation context and requirements.
As part of our WiFi installation process, the technician equipped with a smart FLR-like tablet visited the respondents/participants in their new homes to install the new system (router and signal amplifiers). The technician interacted with the FLR (tablet) to proceed with an optimal WiFi installation for high-speed connection in every room. A supporting video showed a WiFi technician (FLE) with the FLR-like tablet (FLR) at the customer’s home where the WiFi connection should be installed. We manipulated the FLR as per its identity (with name: “Casey” vs without name: “the tablet”) and speech (with speech vs without speech; only text output, read by the FLE to help the respondent understand the artificial intelligent properties of the device).
We measured FLR’s ASP using four items adapted from Čaić et al. (2020) and Odekerken-Schröder et al. (2021), to which respondents answered using seven-point Likert scales (α = 0.87).
Results
We used a realism check based on the three items of Bagozzi et al. (2016) measured with seven-point Likert scales; which yielded a satisfactory result (M = 5.29, SD = 1.25). Besides, we asked respondents about their familiarity with WiFi installations using a single-item seven-point response scale (M = 4.97, SD = 1.82) as a way to ensure the appropriateness of the scenario for our respondents.
A series of one-way ANOVAs confirm that both the FLR’s speech (F (1, 199) = 5.85, p = 0.016; Mno_speech = 3.30, SDno_ speech = 1.45, Mspeech = 3.78, SDspeech = 1.38) and name (F (1, 199) = 4.34, p = 0.039; Mno_name = 3.33, SDno_name = 1.37, Mname = 3.75, SDname = 1.47) have significant direct effects on ASP, as anticipated. A two-way ANOVA demonstrates the interaction effect of FLR’s name and speech on ASP is significant too (F (1, 199) = 4.11, p = 0.044; Mno_name-no_speech = 3.29, SDno_name-no_speech = 1.44, Mno_name-speech = 3.37, SDno_name-speech = 1.31, Mname-no_speech = 3.31, SDname-no_speech = 1.47, Mname-speech = 4.19, SDname-speech = 1.35). In other words, name and speech reinforce each other to build customers’ perception of ASP.
Based on these results, we conclude that companies can provide customers with higher perceptions of robot ASP by simply offering the FLR a name and installing a speech module. Moving forward in our research, we use the combination of these two cues to manipulate ASP across all studies in our quest to discerning the different effects of high- and low-ASP robots.
Study one: how automated social presence relates to teamwork quality, and FLE competence and warmth
Study one aims to uncover how an FLR’s ASP relates to customer perceptions of teamwork quality as well as FLE competence and warmth. Similar to our pre-study, our research setting involves the installation of WiFi at a customer’s home.
Method
We recruited 200 European participants via Prolific. After excluding respondents who failed the attention check (n = 3), we obtained 197 valid responses (mean age = 40.25, 97 females).
The study had a single factor two-condition between-subject design: a high-ASP FLR and a low-ASP FLR condition. Participants were randomly assigned to either the high-ASP condition (n = 97) or the low-ASP condition (n = 100). We first instructed participants to watch the video scenario and imagine being part of it. The scenario was similar to our pre-study setup. So, in the high-ASP condition, the tablet had a name (Casey) and could communicate in natural language, and in the low-ASP condition the tablet had no name and could only communicate via its screen interface (the FLE read out loud the tablet’s advice to hint that the tablet was intelligent). This manipulation yielded a statistically significance difference in perceived ASP (F (1, 196) = 27.04, p = <0.001; Mhigh-ASP = 4.33, SDhigh-ASP = 1.43, Mlow-ASP = 3.29, SDlow-ASP = 1.37). To prevent order effects, we now asked the four ASP items from the prestudy after measuring the dependent variables.
We measured teamwork quality using five items adapted from Guzzo and Shea (1992) and Hatcher and Ross (1991) using seven-point Likert scales (α = 0.90). Perceived competence (α = 0.94) and warmth (α = 0.80) were measured with three-item scales from Scott et al. (2013), using seven-point Likert response options. Finally, we assessed respondents’ perception of scenario realism with three items from Bagozzi et al. (2016) and measured their familiarity with the task of WiFi installation at home with one item (using seven-point Likert scales).
Appendix A provides the full scenario and their descriptions for this study (and all other studies in this paper). Appendix B offers an overview of the measures of our study constructs (in this and the rest of studies in this paper).
Results
The realism check yields a satisfactory result (M = 4.77, SD = 1.26). A similar observation is made about respondents’ familiarity with WiFi installations (M = 4.81, SD = 1.81).
A one-way ANOVA shows that the FLR’s ASP has a significant effect on teamwork quality (F (1, 196) = 4.25, p = 0.040; Mhigh-ASP = 5.79, SDhigh-ASP = 0.87; Mlow-ASP = 5.53, SDlow-ASP = 0.91), where high-ASP FLRs are considered to improve teamwork quality perceptions (vs low-ASP FLRs). We thus find support for H1, confirming that FLR’s ASP fosters customer perceptions of teamwork quality.
To test H2, we used Hayes’ (2018) PROCESS tool, model four (bootstrapping N = 5,000). We find significant indirect effects of the FLR’s ASP on both FLE’s perceived competence (β = 0.16, SE = 0.04, CI95% = [0.10, 0.24]) and warmth (β = 0.17, SE = 0.03, CI95% = [0.11, 0.24]) via teamwork quality. The direct effects of FLR’s ASP on FLE’s competence (β = 0.09, SE = 0.06, CI95% = [−0.02, 0.20]) and warmth (β = 0.01, SE = 0.05, CI95% = [−0.09, 0.10]) are not significant. We thus find support for H2 such that there is a (full) mediation of the effect of FLR’s ASP on FLE’s competence and warmth via teamwork quality.
Study 2A: the moderating role of the FLE’s corrective interrogation
In Study 2a we examine the impact of the FLE’s corrective interrogation behavior on customer perceptions of teamwork quality. More precisely, we position the FLE as the interrogator, whereas the FLR is the interrogated team member. A secondary goal is to corroborate the findings of Study one.
Method
We build on the previous study’s scenario, adding the corrective interrogation factor. Thus, the study had a two (high-ASP vs low-ASP) by two (interrogation vs no interrogation) between-subject design. For the conditions in which there was no FLE corrective interrogation, participants watched the same videos as described in Study one. For the conditions with FLE corrective interrogation, we added a scene portraying the technician (FLE) inquiring about a potential error made by the FLR and requesting a new recommendation.
Using the same data collection process as in the preceding study and after excluding respondents who failed the attention check (n = 4), we obtained 396 valid responses (mean age = 39.37, 197 females). Once again, participants were randomly assigned to one of the four experimental conditions (cell sizes between 97 and 101). The ASP manipulation check at the back of the survey yielded a statistically significance difference between the low- and high-ASP conditions (F (1, 395) = 38.33, p = <0.001). Also, the measures for teamwork quality (α = 0.87), FLE competence (α = 0.91), FLE warmth (α = 0.81) proved reliable again. The same realism and familiarity checks were implemented as in our prior studies.
Results
The sample passed our realism and familiarity checks (respectively: M = 4.80, SD = 1.31; M = 5.08, SD = 1.57). The findings from our one-way ANOVAs show a significant direct effect of FLR’s ASP on teamwork quality (F (1, 395) = 20.93, p < 0.001). Specifically, in the high-ASP condition, teamwork quality perceptions were higher than in the low-ASP condition (Mhigh-ASP = 5.69, SDhigh-ASP = 0.88; Mlow-ASP = 5.27, SDlow-ASP = 0.98). So, we find additional support for H1.
The results of our PROCESS analysis (model four; bootstrapping N = 5,000) corroborated the previously supported mediation effect. Results demonstrate significant indirect effects of the FLR’s ASP on FLE competence (β = 0.14, SE = 0.02, CI95% = [0.10, 0.19]) and warmth (β = 0.13, SE = 0.02, CI95% = [0.09, 0.17]) via teamwork quality. The direct effects of FLR’s ASP on FLE’s competence (β = 0.06, SE = 0.04, CI95% = [−0.02, 0.13]) and warmth (β = 0.05, SE = 0.03, CI95% = [−0.02, 0.12]) again were not significant. We thus further substantiate H2 and teamwork quality’s mediational role between FLR ASP and FLE evaluations.
Finally, a two-way ANOVA shows a significant interaction effect of ASP and FLE’s corrective interrogation behavior on teamwork quality (F (1, 395) = 11.42, p < 0.001; Mhigh_ASP-Interrogation = 5.71, SDhigh_ASP-Interrogation = 0.77, Mhigh_ASP-No Interrogation = 5.68, SDhigh_ASP-No Interrogation = 0.97, M low_ASP-Interrogation = 4.97, SDlow_ASP-Interrogation = 0.95, Mlow_ASP-No Interrogation = 5.57, SDlow_ASP-No Interrogation = 0.91).
For the interaction of FLE’s corrective interrogation on the FLR’s ASP-teamwork quality relationship, we observe that FLEs who correctively interrogate high-ASP FLRs yield a significantly higher teamwork quality than those who do so to low-ASP FLRs (t(197) = 4.47, p < 0.001). Remarkably, when there is no interrogation, ASP has no significant effect on teamwork quality (t(195) = 0.19, p = 0.853). As the direction of the moderating effect of FLE’s corrective interrogation is positive, we find support for H3.
Study 2B: the moderating role of the FLR’s corrective interrogation
In Study 2b we examine the impact of the FLR’s corrective interrogation behavior on customer perceptions of teamwork quality. In this endeavor, we position the FLR as the interrogator, whereas the FLE is the interrogated team member. That is, we switch roles within the team. As a secondary goal, we examine whether making it salient that the FLE made a mistake has any direct repercussions on the customer evaluation of the employee.
Method
The study used the same scenarios and a two (high-ASP vs low-ASP) by two (interrogation vs no interrogation) between-subject design. For the conditions in which there was no FLR corrective interrogation, participants watched the same videos as described in Study one. For the conditions with FLR corrective interrogation, we added a scene portraying the digital assistant/tablet (FLR) inquiring about a potential error made by the FLE and afterwards running a new recommendation.
Using the same data collection process as in the preceding study and after excluding respondents who failed the attention check (n = 4), we obtained 396 valid responses (mean age = 39.21, 193 females). Once again, participants were randomly assigned to one of the four experimental conditions (cell sizes between 98 and 100). The ASP manipulation check at the back of the survey yielded a statistically significance difference between the low- and high-ASP conditions (F (1, 395) = 40.58, p = <0.001). Also, the measures for teamwork quality (α = 0.90), FLE competence (α = 0.91), FLE warmth (α = 0.85) proved reliable again. The same realism and familiarity checks were implemented as in our prior studies.
Results
The sample satisfactorily passed our realism and familiarity checks (respectively: M = 4.73, SD = 1.32; M = 5.01, SD = 1.67). Our one-way ANOVA shows a significant impact of FLR’s ASP on teamwork quality (F (1, 395) = 29.79, p < 0.001). Specifically, in the high-ASP condition, teamwork quality perceptions were higher than in the low-ASP condition (Mhigh-ASP = 5.72, SDhigh-ASP = 0.92; Mlow-ASP = 5.18, SDlow-ASP = 1.06). So, we again find support for H1.
The results of our PROCESS analysis (model four; bootstrapping N = 5,000) corroborated again the mediation effect of FLR’s ASP on FLE’s competence and warmth via teamwork quality. We find significant indirect effects of the FLR’s ASP on FLE competence (β = 0.28, SE = 0.04, CI95% = [0.21, 0.36]) and warmth (β = 0.24, SE = 0.04, CI95% = [0.18, 0.31]) via teamwork quality. Furthermore, this time we find a significant direct effect of FLR’s ASP on FLE’s competence (β = 0.14, SE = 0.04, CI95% = [0.05, 0.22]) and marginally significant on warmth (β = 0.06, SE = 0.04, CI95% = [−0.01, 0.14]), perhaps because, in the interrogation conditions, the FLR made the role of the employee more salient by catching a mistake of the employee. Nonetheless, we again support for H2 given the significant indirect effects.
Finally, a two-way ANOVA shows a significant interaction effect of FLR’s ASP and FLR’s corrective interrogation behavior on teamwork quality (F (1, 395) = 4.24, p = 0.040; Mhigh_ASP-Interrogation = 5.81, SDhigh_ASP-Interrogation = 0.99, Mhigh_ASP-No Interrogation = 5.63, SDhigh_ASP-No Interrogation = 0.83, M low_ASP-Interrogation = 5.06, SDlow_ASP-Interrogation = 1.18, Mlow_ASP-No Interrogation = 5.29, SDlow_ASP-No Interrogation = 0.92). For the interaction of FLR’s corrective interrogation on the FLR’s ASP-teamwork quality relationship, we observe that high-ASP FLRs who correctively interrogate FLEs yield a significantly higher teamwork quality than low-ASP robots (t(195) = 4.82, p < 0.001). Additionally, when there is no interrogation, FLR’s ASP has a significant effect on teamwork quality (t(195) = 2.75, p = 0.007). As the direction of the moderating effect of FLR’s corrective interrogation is positive, we find support for H4.
FLR’s corrective interrogation does not significantly moderate the direct relationships between FLR’s ASP and FLE evaluations. This means that there are no detrimental effects on neither FLE’s competence (F = 0.00, p = 0.971) nor warmth (F = 0.00, p = 0.982). In other words, while the effect of FLR’s ASP on teamwork quality is enhanced when FLRs practice corrective interrogation that does not happen at the expense of customers’ perceptions toward FLEs. Thus, customers do not penalize FLEs for their mistakes in the service provision as long as the errors are identified and corrected by the other (robotic) team members.
Ruling out an alternative account
Although we set up our framework and hypotheses around service recovery reasoning and thus highlighted the role of correcting mistakes, an alternative explanation for our effects would be that any simple communication between the robotic and human team members would strengthen the effect of ASP on teamwork quality. To rule out this alternative account, we set up two other studies in which we examined the moderating effect of confirmatory interrogation. As opposed to corrective interrogation, confirmatory interrogation involves FLEs (FLRs) seeking validation or verification from the robot (human) to decide on a service action (i.e. it is about confirming the righteousness of an action, not correcting the process).
We ran a video-based experiment mirroring Study 2a but deploying confirmatory interrogation instead. Results show an insignificant interaction effect of FLR’s ASP and FLE’s confirmatory interrogation on teamwork quality (F (1, 397) = 0.15, p = 0.700). Next, we also executed an alike video-based experiment to Study 2b with confirmatory interrogation. Similarly, we do not find a significant interaction effect of FLR’s ASP and FLR’s confirmatory interrogation on teamwork quality (F (1, 394) = 0.81, p = 0.369). As a consequence, we conclude that for an interrogation to be effective it has to be corrective in nature to yield improvements in teamwork quality in teams with high-ASP robots.
Study 3: the employee perspective and the hybrid team evaluation paradox
The present study has four goals. First, we aim to provide a holistic perspective on hybrid teams by taking the employees’ perspective on the relationships between ASP, teamwork quality and interrogation. Second, we aim to add to the external validity of our work by gathering field data. Third, we aim to add to the generalizability of our work by gathering these data from a related yet different context, i.e. hybrid sales teams of a large multinational firm in a B2B context. Finally, we aim to take a first look at the longer-term effects of interrogation behavior. Following the service recovery literature, proactively catching and correcting mistakes may work once, but will likely harm customer evaluations in the long run (de Matos et al., 2007). Thus, we anticipate that a continuous interrogation of the FLR by the FLE may backfire. We expect that employees will also feel that the quality of their hybrid teamwork to be lower if they have to interrogate their socially present robot companion constantly.
Method
This field study gathered data in the agro-chemical division of the focal company. The division created and introduced a virtual sales assistant for its salesforce called JENS—note that this name is pseudonymized for confidentiality reasons. JENS was launched 12 months before we collected the data. Customers are distributors of agro-chemical products who buy crop protection products to resell to growers.
JENS is installed on a laptop or tablet and helps sales reps optimize customer interactions by providing real-time data and analyses on customer-relevant queries. JENS is capable of offering insights and advice in a tabular and graphical fashion regarding distributors’ market coverage, share of wallet, estimated product usage and other distributor-relevant information. These insights can help sales reps to close better deals. Given that the software has an identifiable name and often is central to the conversation given the unique information it provides, we expected the FLEs to perceive JENS to have moderate ASP (i.e. at least higher than FLRs with no identity). Using several short interviews with sales reps, we established that they considered JENS a partner or quasi-colleague partly due to the name and properties.
We collected data from the firm’s sales reps in Southern Europe using a survey instrument. We contacted and encouraged these FLEs to participate in our study on a personal basis. As a result, of the 57 FLEs approached, 50 participated, a response rate of 88%. The sample consisted mainly of men, which resonates with the gender distribution of the employees in this job (N = 50; mean age = 48.86, mean years of experience in sales = 18.24, five females). Dummies were added to control for country differences.
We asked the company’s sales reps to reflect on their last six months of working with JENS. We focused on and thus measured the FLEs’ perceived ASP of JENS (α = 0.92), teamwork quality (α = 0.96) and their interrogation behavior of JENS (α = 0.68). The first two measures were similar to those of the previous video-based experiments but adapted to the sales organization context and level of sophistication of JENS. The interrogation measure was based on Castelo et al. (2019) and Kaiser et al. (2017). All item responses were recorded on seven-point Likert scales (see Appendix B).
We used the information from the preliminary interviews and additional manager insights to facilitate the adaptation of the measures. Although we intended to separate confirmatory and corrective interrogation, based on the feedback we decided to use an aggregate measure of interrogation, since we are retrospectively assessing these FLE–FLR interactions and recalling the exact nature of interrogations is difficult—measures would be inaccurate. Notwithstanding, we expected respondents to recollect namely corrective interrogations as these are the most salient given their emotional intensity and valence. The feedback was also used to adapt the ASP and teamwork quality measures. For instance, the ASP items were focused more on whether the FLE considered JENS an assistant or colleague. Teamwork quality was recalibrated using the sales rep’s rather than the customer’s view of efficient and effective information exchange. Finally, anticipating high social desirability among sales reps in their self-reported warmth and competence evaluations, we did not include these constructs for this final data collection. This exclusion also helped to keep the survey concise.
Results
As anticipated, the sales reps considered JENS’ ASP on average to be reasonably high (M = 4.22, SD = 1.21 on a seven-point scale), which supports the assumption of the FLE and JENS acting as a hybrid team. The results of the regression of teamwork quality on ASP, controlling for the sales reps’ years of experience, confirmed that JENS’ ASP significantly and positively affects perceived teamwork quality (β = 0.77, t = 8.26, p < 0.001). Thus, results from our field data corroborate our key experimental finding of H1, this time from an employee perspective.
Subsequently, we conducted a moderation analysis using PROCESS (model 1, bootstrapping N = 5,000), again controlling for FLE’s years of experience in sales. The results show a significant moderation effect of FLE’s interrogation (β = −0.22, p = 0.001) on the relationship of JENS’ ASP on teamwork quality. Given the moderation effect’s negative valence, H3 is not supported in this employee sample but instead we find significance in the opposite direction. Comparing the customer and employee perspectives, we thus uncover an apparent misalignment in these relationships, which we refer to as the hybrid team evaluation paradox. We further elaborate on this idea in the discussion section.
Discussion
Theoretical implications
This paper demonstrates how perceptions of teamwork quality and employee performance in hybrid teams depend on whether the FLR has a high or low ASP and whether the FLE and FLR interrogate and correct each other. We also address how they do so, as we focus on a specific form of interrogation—corrective interrogation.
Our findings contribute to the service literature on the crossroads of human‒robot hybrid teams in the frontline, social cognition and automated social presence and have several theoretical implications. Specifically, our study helps better understand hybrid teams and the mechanisms through which FLRs influence team and FLE evaluations. We discuss the theoretical implications of our work in detail below.
First, we provide a holistic view of hybrid teams and frontline performance in a time when current research is fragmented, at best. Just a few articles have regarded hybrid teams in service settings concentrating on task types (Le et al., 2022), employee willingness to collaborate (Paluch et al., 2021), employee risk perceptions (Parvez et al., 2022) and employee productivity (Sowa et al., 2021). Furthermore, literature taking the customer view can still be carried forward, building on seminal works (e.g. De Gauquier et al., 2023; Odekerken-Schröder et al., 2021). We extend this promising literature by demonstrating that FLR’s ASP is an essential concept, and that teamwork quality is a crucial mediating instrument to manage customer evaluations of frontline employees. Teamwork quality increases when FLR’s ASP is high (compared to when it is low). In turn, teamwork quality is the mechanism that precedes the way customers evaluate FLEs’ competence and warmth. This finding extends research on collaborative intelligence by demonstrating that customers perceive FLRs as team members qualified to collaborate with human employees (Huang and Rust, 2022) and contribute to teamwork quality. If customers observe synchronicity between the members of a hybrid team, they deduce a higher teamwork quality, which prompts a halo effect from the general hybrid team to the specific FLE. Consequently, customers perceive that the individual FLE must be outstandingly proficient (Meindl et al., 1985; Rosenzweig, 2007).
Second, our work contributes to the hybrid teams literature by identifying FLE’s and FLR’s corrective interrogation as a significant contingency in shaping beneficial customer perceptions of teamwork quality. We lean on the collective mindfulness theory to posit that a shared awareness of the service situation leads to heightened team performance. Corrective interrogations give control to service employees (Paluch et al., 2021) and power to FLRs (Shanks et al., 2024) which allow them to detect and correct team members’ errors, evidencing how synergistic are both human and robotic capabilities are in the service provision (Huang and Rust, 2022). Compared to other forms of communication (e.g. confirmatory interrogation), corrective exchanges imply a more intense level of harmony and coordination between FLEs and FLRs. This finding has clear parallels to the service recovery literature, to which we also add new insights. That is, FLE behaviors to mitigate the customers’ experienced discomfort of service failures are well established. The frontier of robotic service recovery literature has so far focused on mistake or unfavorable decision attribution (Mozafari et al., 2022), recovery ownership (Hu et al., 2021) and robotic self-recovery (Choi et al., 2020). We find that, in the case of corrective interrogations on FLEs made by FLRs, customers do not penalize the employee for their mistakes, given that the team preserved the customers’ best interests (i.e. teamwork quality matters).
Finally, we innovatively focus on both the customer and employee perspectives on hybrid teams. Current works mostly concentrate on FLEs’ perceptions of the robot, thereby neglecting the hybrid team element (e.g. Paliga, 2022; Arslan et al., 2022; Simon et al., 2020). Thanks to Study 3, we complement our understanding of the customer with that of the employee. We studied the long-term effects of interrogation, as opposed to single-encounter dynamics, as perceived by actual sales reps operating high-ASP unembodied FLRs. Whilst we corroborate the positive direct effect of FLR’s ASP on teamwork quality (H1), we fail to replicate the positive moderation effect of interrogation on the relationship of FLR’s ASP on teamwork quality (H3). In fact, the moderation effect is significant and negative, rather than positive (β = −0.22, p = 0.001). In other words, high-ASP robots have a less positive impact on teamwork quality for employees who have to often correctively interrogate these digital team members. The differences between the customers’ and employees’ point-of-view give rise to, what we term, the hybrid team evaluation paradox. While customers appreciate the tight knitting in teams that interrogation brings, employees who have to continuously engage in correcting behaviors may feel an additional responsibility. FLEs then feel exhorted to undertake their designated roles as well as sanity checking and rectifying plausible errors in their non-human counterparts (Huang and Rust, 2021; Paluch et al., 2021). This paradox represents the nuance of human–robot collaboration and merits additional investigation into the conflicting viewpoints determining the teamwork quality of hybrid teams.
All in all, our paper offers a more holistic view of hybrid human teams, hopefully serving as a solid foundation to inspire more empirical studies within the hybrid team literature stream.
Managerial implications
Although we are only witnessing the start of the hybrid teams era, managers should start thinking about optimizing resources in their frontlines to avoid undesirable customer experiences. Our research brings straightforward suggestions to service managers as well as to robot manufacturers.
First, firms should ensure that FLRs are high in ASP to elevate customer and employee perceptions of teamwork quality. Specifically, it helps if robots have an identity (name) and can verbally communicate with natural language (speech). These features will elicit perceptions of more evident team collaboration perceptions. Importantly, for customers these perceptions translate into better evaluations of FLE’s competence and warmth, a crucial achievement in prolonged customer satisfaction and loyalty.
Second, we recommend that firms stimulate FLEs to have a positive yet critical attitude toward their FLR companions. FLEs can be trained to use interrogation with their FLR companions during the service provision. It helps customers process the hybrid team’s shared awareness and collective goal to put customers’ needs first. Ideally, these interrogations should be corrective. Nonetheless, attention should go into training FLEs on the benefits of interrogative behaviors, so they recognize their value to mitigate their inner frustration during interrogation-heavy team collaborations. This way, unintended FLEs’ negative attitudes toward teamwork quality can be minimized in favor of ideal customer perceptions. Taking a complementary view, we recommend firms to allow high-ASP FLRs to correctively interrogate employees as this enhances teamwork quality perceptions at no cost for the FLE’s competence and warmth. This is encouraging news for FLEs who are either unsure in their actions or afraid of making mistakes. In other words, firms should comprehend that in hybrid teams, making an occasional mistake does not have to end in drama. It can even be beneficial as long as either the FLE or the FLR catch and correct each other’s errors.
Lastly, firms should remain informed about advancements in FLR’s ASP as customers may become increasingly conscious and sensitive toward FLRs and their ASP in the upcoming future. FLR’s ASP features (e.g. speech and identity) may become irrelevant and become obsolete. Implementing novel, better ASP characteristics as they become available can mitigate this foreseeable development. This is also why FLR manufacturers should continue innovating and investing in ground-breaking ASP enablers.
Limitations and future research
We recognize the limitations of our study and motivate other scholars to resolve them in their future works.
First, future studies could further investigate the under researched B2B arena (beyond our present work, see the exceptional case of Ameen et al. (2024)) where customers and FLEs’ evaluations may differ. In this light, prospect work contrasting cross-sectional with longitudinal data could shed meaningful light on people’s attitudinal evolution under hybrid settings. Other meaningful differences may emanate within sub-classes of B2B settings; for instance, one could think of confronting highly regulated industries (e.g. financial services, pharmaceuticals, telecommunications) with less strict ones (e.g. business and management consulting, logistics for non-hazardous products, creative agency services). From another angle, it could be worth exploring hybrid teams composed of more FLEs and/or FLRs since such larger teams are not unusual in B2B, resulting in distinctive evaluations. These forward-looking research directions might disclose unexpected effects of FLRs’ ASP on teamwork quality perceptions of customers (and FLEs), which would ultimately affect FLEs (self-evaluations).
Second, forthcoming research could try to identify alternative ASP cues that are as effective as FLRs’ identity and speech. For instance, embodied robots may be better positioned in this regard compared to non-embodied ones. In our case, all the non-embodied FLRs we studied surpassed the high-ASP barrier given its human-like identity and/or speech. However, the FLR in Study 3 possessed only identity and had no speech features, which limited its ASP despite the fact it was rated as high due to its salient ASP during customer interactions (i.e. sales reps intentionally refer to JENS as another entity and address it by its name which ultimately enhances this FLR’s ASP as compared to any other software inhabiting a smart tablet/device). Further, upcoming studies could look into certain ASP cues’ suitability as per the entailed task. To illustrate this point, tangible (e.g. embodiment) and intangible (e.g. natural language processing) ASP cues could see their effectiveness vary depending on if FLRs should deploy mechanical, thinking or feel intellectual capabilities (Huang and Rust, 2021). From another point of view, and perhaps more constrained to the theoretical realm, both FLEs’ social presence and FLRs’ ASP could be simultaneously studied to create optimal combinations (of intensities). Speculating on this, customers may evaluate better highly present FLEs and lowly present FLRs in financial services, while in healthcare consultations, they would rather see a more dominant FLRs’ ASP (due to feelings of embarrassment; see Pitardi et al. (2021)).
Lastly, the intriguing paradox we observed necessitates supplementary exploration. While customers view interrogations in hybrid teams positively, perceiving them as evidence of enhanced teamwork quality, FLEs perceive potential shortcomings in overall teamwork. This inconsistency features a multifaceted back-and-forth of expectations and responsibilities in human–robot collaboration. Future research should investigate alleviating factors and strategies to align the paradoxical perspectives. Such initiatives may conglomerate (1) FLE-oriented trainings to clearly understand what to (not) expect from their robotic counterparts, (2) real-life demos on how to best enact their interactions in front of customers, (3) upgrade FLRs’ machine learning power to quickly ride the learning curve and (4) recurrently include FLEs’ customization preferences in FLRs’ behavioral code. This type of effort could offer insights for optimizing the effectiveness of hybrid service teams for all parties involved.
Conclusion
This paper elucidates for the first time how the type of robot (low ASP vs high ASP) influences customers’ perceptions of employees in a hybrid team. Our theory-backed findings demonstrate that customers form their perceptions by assessing the teamwork quality of hybrid teams and then cognizing FLEs’ competence and warmth. The most beneficial effects are accomplished by high-ASP FLRs which (1) are correctively interrogated by FLEs and (2) correctively interrogate FLEs. Abundant research directions are waiting to be initiated, with the pressing need to link FLEs and FLRs in service delivery. We hope our sprouting research steps shall be followed by future work.
This project received funding from BASF SE under its determination to research innovative go-to-market technologies for customer interactions. The information and views displayed in this study are those of the authors and do not necessarily reflect the official opinion of BASF SE. Neither BASF SE nor any person acting on its behalf may be held responsible for the use which may be made of the information contained therein. Supporting LLMs (namely, ChatBASF, ChatGPT and Grammarly) have been utilized to improve language and readability.
References
The supplementary material for this article can be found online.
